

Robot system with visual servo and detection functions
A robot system and visual servo technology, applied in the field of robot systems, can solve the problems of low precision of robot models, difficulty in integration, and low precision, and achieve the effects of improving motion control efficiency, simple structure, and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
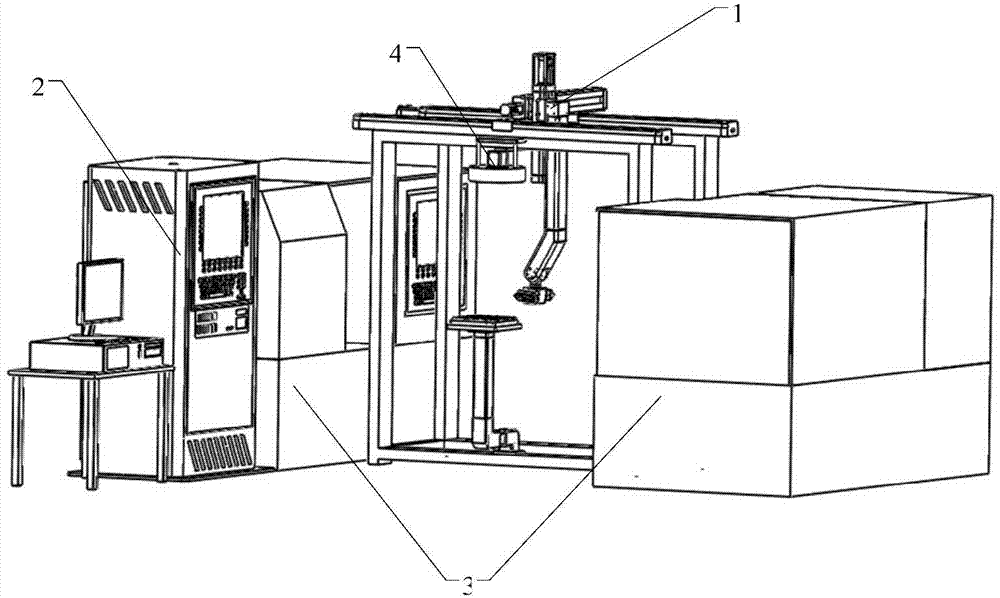
[0023] This embodiment is a robot system with visual servoing and detection functions.
[0024] refer to figure 1 , figure 2 The overall structure of the automatic loading and unloading three-coordinate robot unit and processing unit includes four parts, namely robot 1, robot visual servo control unit and communication network unit 2 connecting each module, CNC machine tool 3, image acquisition and image processing unit 4 . The robot 1 is installed between two CNC machine tools 3, and the robot 1 completes the task of loading and unloading the CNC machine tools 3; the robot visual servo control unit and the communication network unit 2 connecting each module are installed next to the CNC machine tools 3, and control the three Coordinate the movement of the robot 1, and the CNC machine tool 3 completes the processing of the workpiece; the image acquisition and image processing unit 4 is placed above the bracket 1 on the machine, and is used to photograph the robot’s work sit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More