

Tracking control device and method of mechanical arm system
A technology of tracking control and manipulators, which is applied in manipulators, manufacturing tools, etc., can solve problems such as control errors that do not consider the hysteresis phenomenon, achieve the effects of reducing the impact of external disturbances, improving reliability and life, and reducing chattering problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
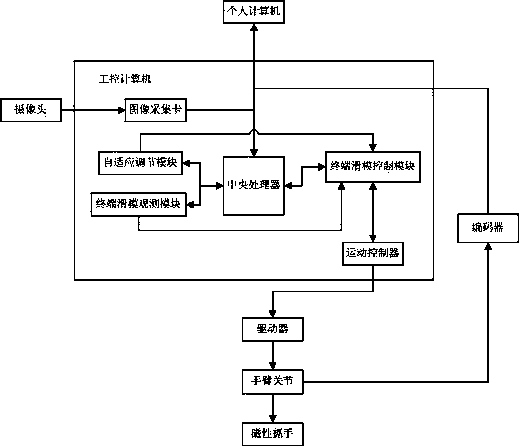
[0024] as attached figure 1 As shown, a tracking control device of a manipulator system in this embodiment performs tracking control on the manipulator system, and the tracking control device includes: a personal computer, an industrial computer, a camera, a driver, an encoder, an arm joint and an installation The magnetic gripper at the end of the arm joint is connected with the signal of the personal computer and the industrial control computer. The camera transmits the collected image signal to the central processing unit of the industrial control computer for processing, and then the personal computer processes the image information to generate the planned path of the robotic arm. The encoder transmits the acquired motion signals of the arm joints to the central processing unit of the industrial control computer for processing, and the control signals processed by the industrial control computer are transmitted to the driver through the motion controller, and the driver dri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More