

Construction method for active-disturbance-rejection controller of hybrid electric vehicle BSG system
An active disturbance rejection controller, hybrid vehicle technology, applied in adaptive control, general control system, control/regulation system, etc., can solve the problems of external disturbance, severe oscillation, sudden change of system parameters, etc., to achieve good disturbance immunity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0031] The concrete implementation of the present invention divides following 8 steps:
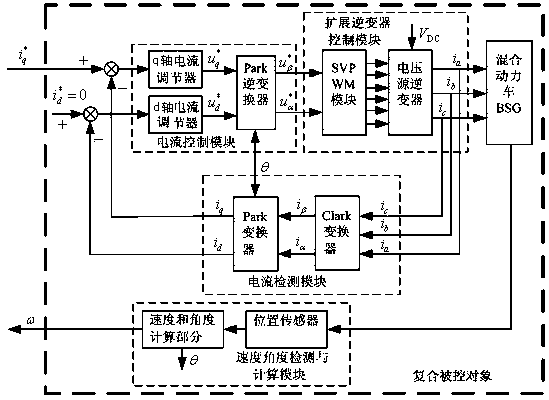
[0032] 1. If figure 1 and figure 2 As shown, the q-axis current regulator and the d-axis current regulator are connected in parallel first, and then connected in series with the Park inverter to form a current control module; the SVPWM module is connected in series with the voltage source inverter to form an extended inverter control module, where The SVPWM module outputs six PWM signals to drive the voltage source inverter; the Clark converter and the Park converter are connected in series to form a current detection module; the position sensor is connected in series with the speed and angle calculation part to form a speed angle detection and calculation module, in which the speed and angle One output of the computation part is the angle , the signal is simultaneou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More