

Rapid K shortest path planning method applied to GPS
A technology of the shortest path and path, which is applied in the field of computer networks to achieve the effect of improving practicability, reducing occupied space, and improving search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
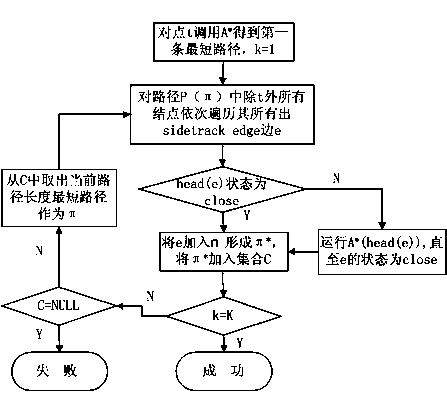
[0055] refer to figure 1 , for the K short path computer algorithm flow process described in the present invention, in conjunction with above concrete problem analysis, obtain the concrete steps as follows:
[0056] Step 1: Call A* algorithm on node t to get the shortest path, define variable k, let k=1;
[0057] Step 2: For all nodes in the path P(π) (except t ), for all outgoing sidetrack edge e of this node, if the state of head (e) is not close, run A* until the state of head (e) is close, add e to π to form a new path π*, calculate Path π*length l(π*)=d(t)-d(head(e))+w(e)+d(tail(e)), add path π* to set C;
[0058] Step 3: If K shortest paths have been obtained, go to Step 7;
[0059] Step 4: If C is empty, go to Step 6;
[0060] Step 5: Take a shortest path from the set C as the current shortest path π, and go to step 2;
[0061] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More