

UUV underwater recycling control system and control method based on self-adaptation algorithm
An adaptive algorithm and underwater recovery technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of complex structure and interference of the autonomous recovery system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention is described in detail below in conjunction with accompanying drawing:
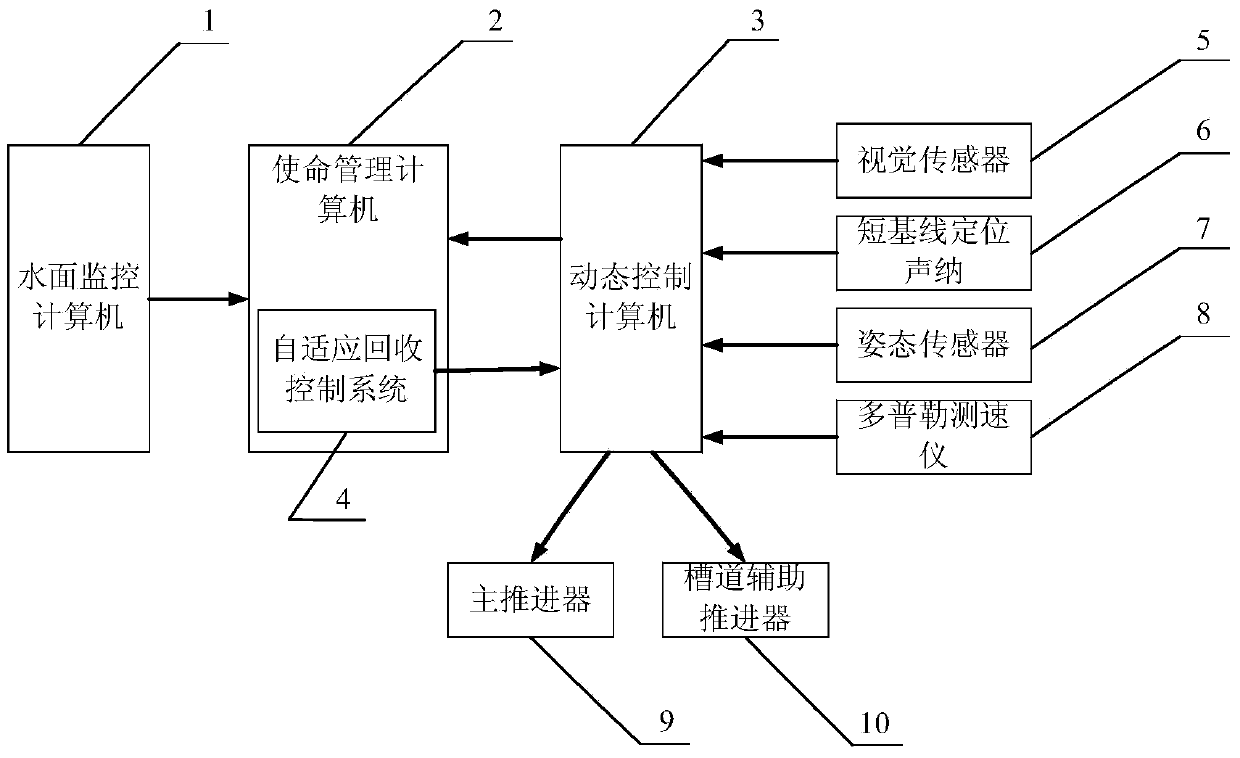
[0026] figure 1 Explain the relationship between the various parts in the present invention. In the UUV recovery self-adaptive control system, the water surface monitoring computer 1 and the dynamic control computer 3 are PCs, and the mission management computer 2 is a PC104 bus computer. They are all embedded with software and communicate with each other through a local area network. Communication, used for autonomous recovery of UUV adaptive control method; wherein UUV adaptive recovery control system 4 is embedded in mission management computer 2; visual sensor 5, short baseline positioning sonar 6, attitude sensor 7 and Doppler speedometer 8 through the serial port Communication, the collected data is transmitted to the dynamic control computer; the dynamic control computer 3 controls the main thruster 9 and the channel auxiliary thruster 10 through electrical signals;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More