

Map building method based on thermal infrared camera and laser range finder
A technology for laser range finder and map construction, applied in maps/plans/charts, instruments, measuring devices, etc., can solve problems such as low visibility, achieve the effects of eliminating noise interference, fast calculation speed, and narrowing the solution space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the technical solutions and advantages of the present invention clearer, the present invention will be further described in detail with reference to the accompanying drawings, not to limit its protection scope.
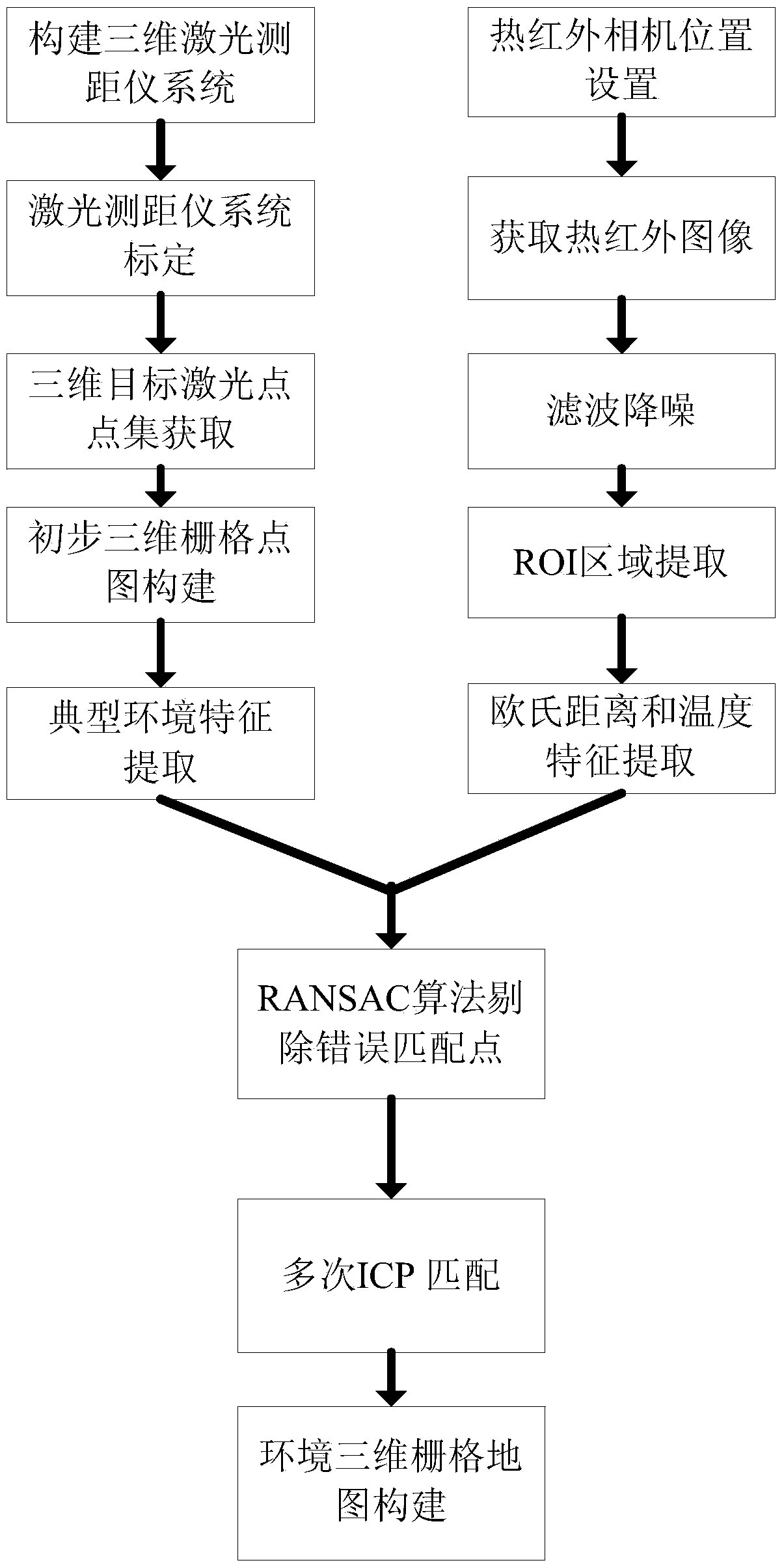
[0027] figure 1 An implementation flowchart of the system of the present invention is given. Such as figure 1 Shown, generally speaking, method of the present invention comprises the steps:
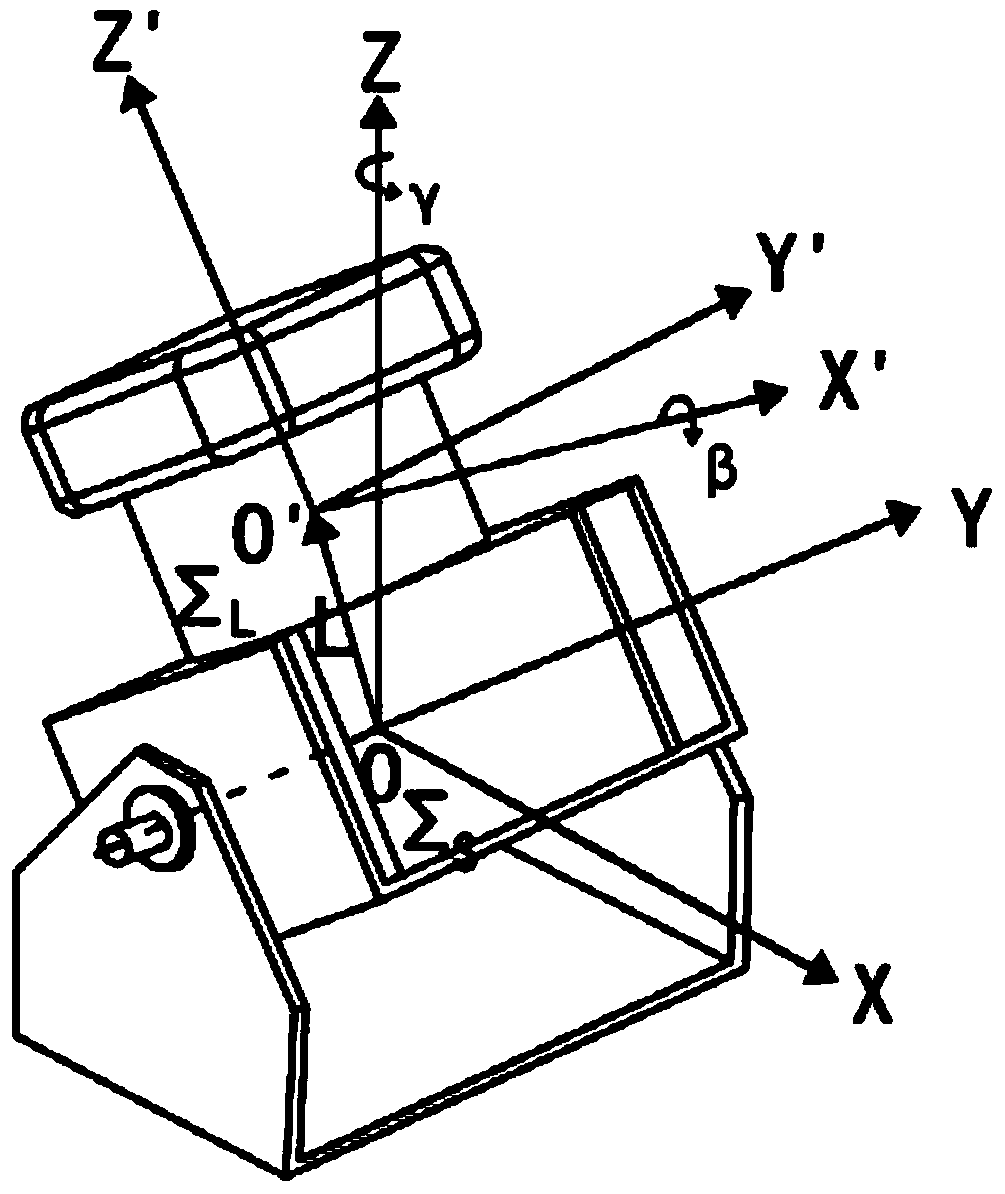
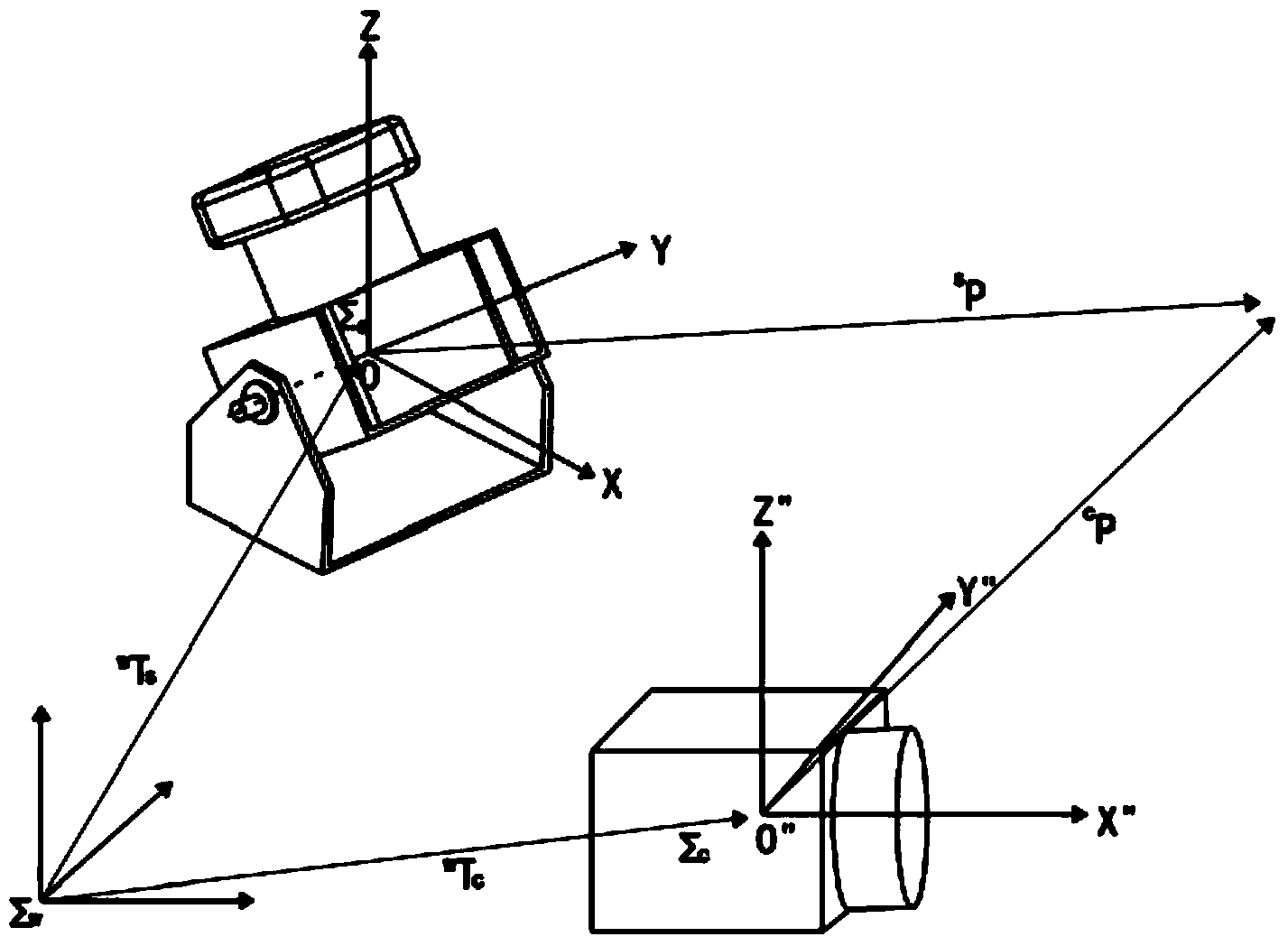
[0028] Step 1. Use the LMS200 laser rangefinder from SICK in Germany to cooperate with the free-rotating motor to build a 3D laser scanner, and use the laser rangefinder to scan the 3D scene. The 3D laser ranging system is composed of a small pan / tilt with a built-in motor and a LMS200 laser rangefinder. It is installed obliquely, and the built-in motor of the pan / tilt drives the laser. The present invention employs a rotating electrical connector contacted by mercury so that the rangefinder can rotate freely without twisting the cable. The three-dimen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More