

Target capturing system and method of explosive ordnance disposal robot
A technology for EOD robots and robots, applied in manipulators, program-controlled manipulators, and manufacturing tools, etc., and can solve problems such as complex algorithms, high operator requirements, and difficulty in accurate identification.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
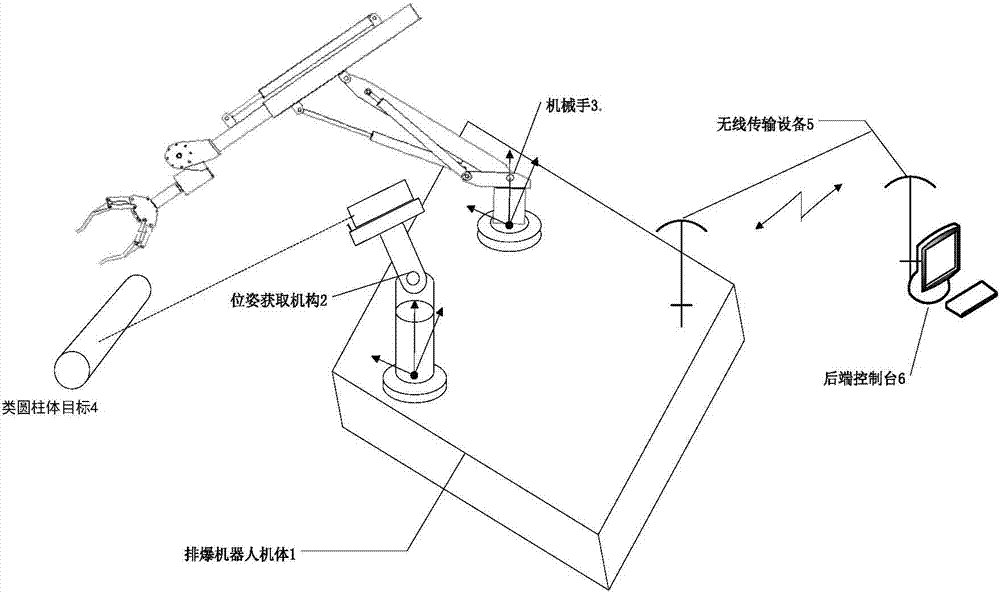
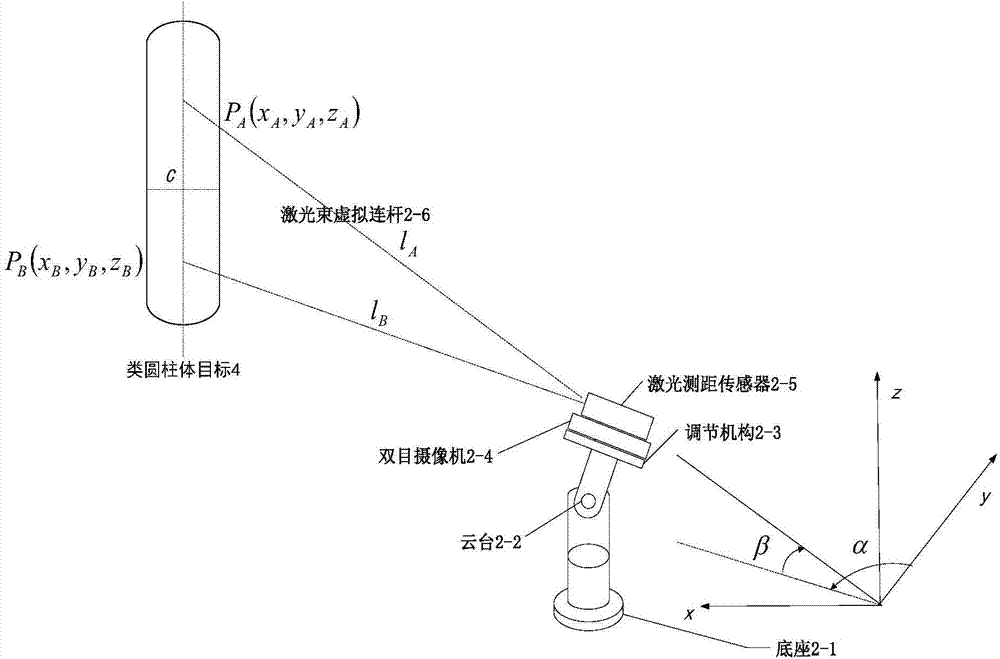
[0098] In this embodiment, FY-SP2515 outdoor digital pan / tilt (positioning accuracy is ±0.1°), DLS-C30 laser ranging sensor, two Hitachi VK-S888N integrated cameras, and wireless digital audio and video transmission system are used. and other equipment to build a pose acquisition mechanism, the system block diagram is as follows Figure 4 shown. Under the guidance of binocular vision, the remote operation three-dimensional space point position measurement, the cylinder-like pose acquisition, and guide the manipulator to autonomously grasp. Combining binocular vision technology with this pose acquisition mechanism can also realize the organic combination of binocular vision distance measurement and virtual link pose measurement. In the embodiment using the principle of this mechanism, within the reachable range of 0.2 to 2 meters by the manipulator, the comprehensive error of the target position is less than 2 millimeters, and the error of the space attitude angle is less than...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More