

Autonomous integrated navigation system
An integrated navigation system and main navigation technology, applied in the field of autonomous integrated navigation system, can solve the problems of difficult PF performance, difficult implementation of UKF algorithm, poor real-time performance of the system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
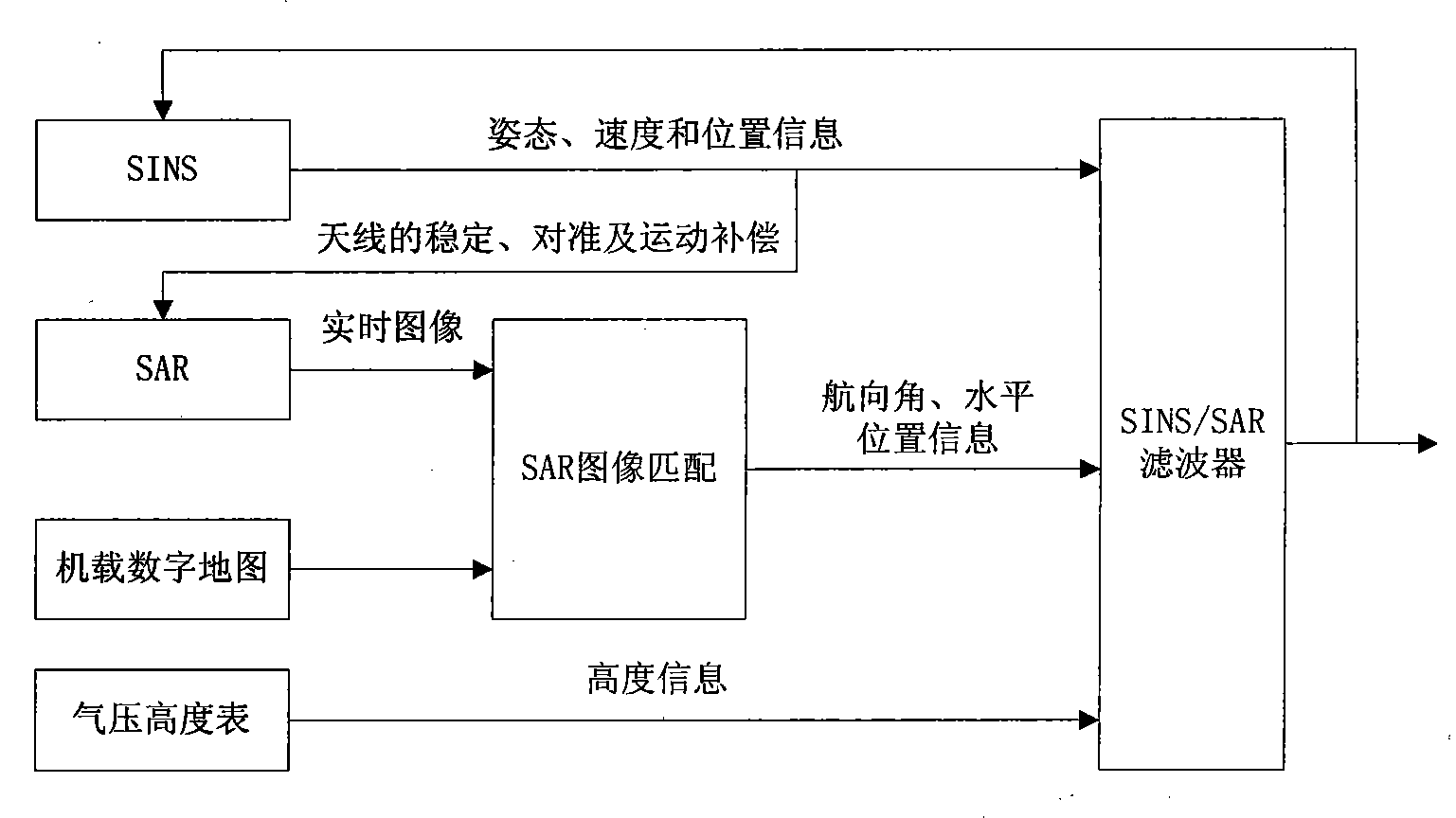
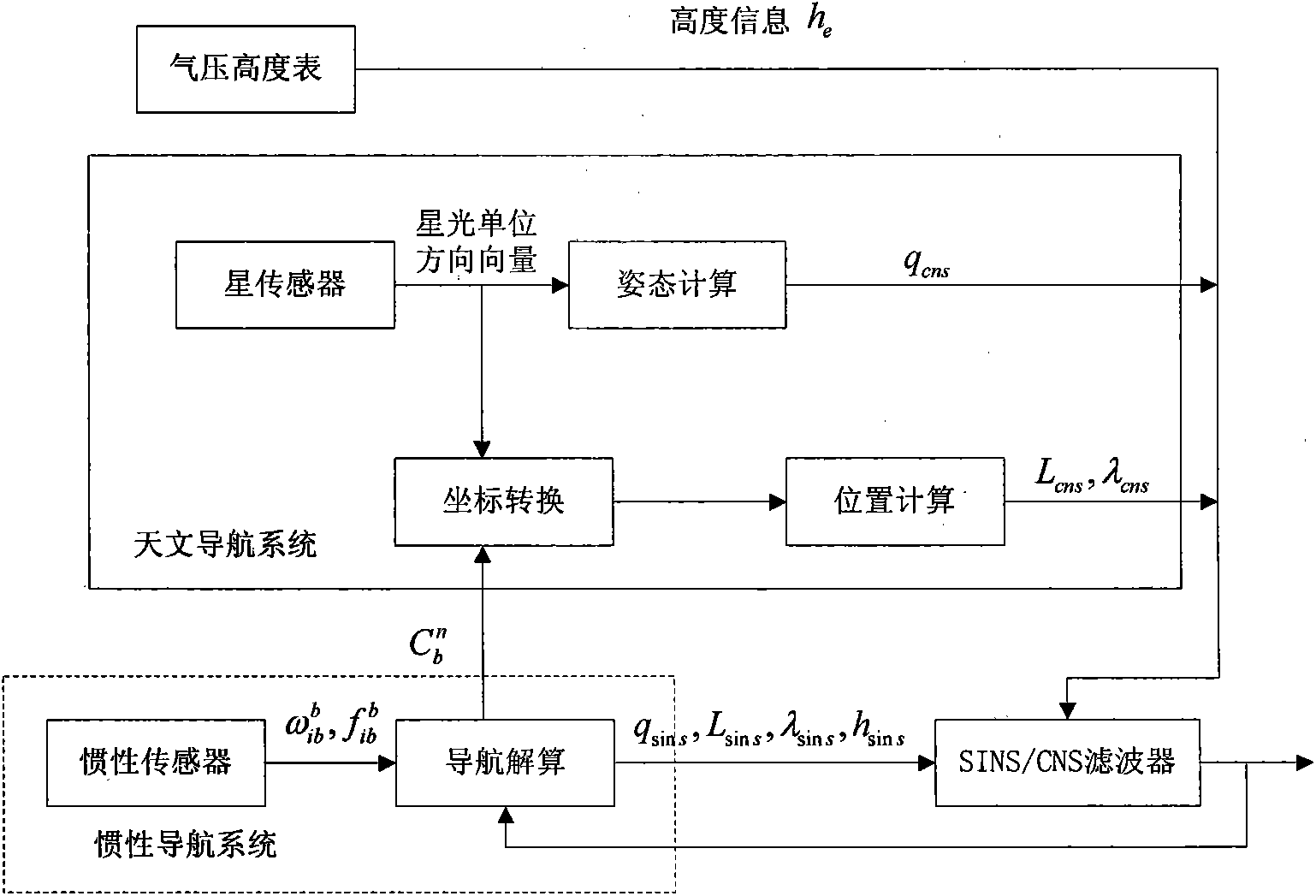
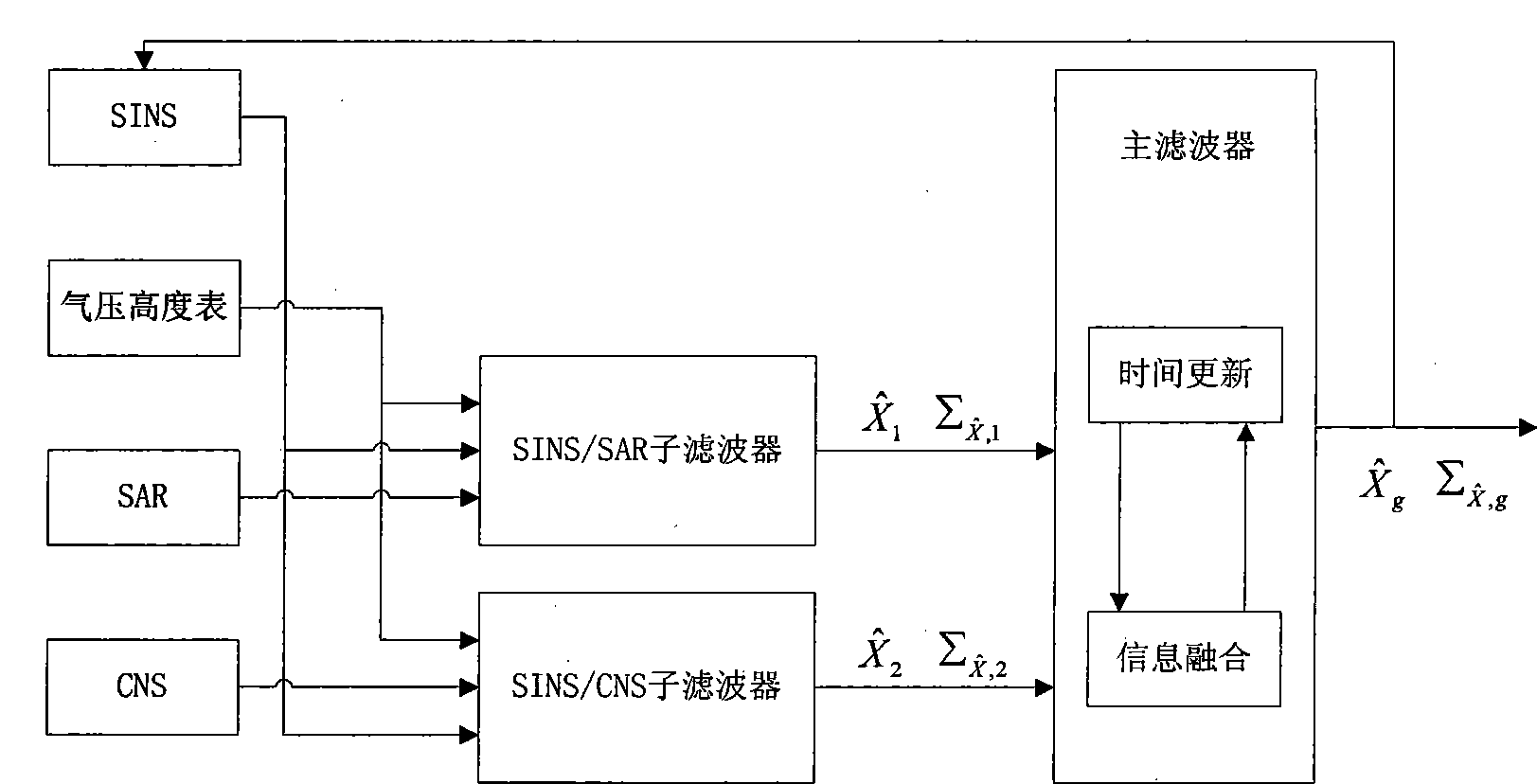
[0171] SINS / SAR integrated navigation schematic diagram such as figure 1 Shown. figure 2 It is the principle of the SINS / CNS integrated navigation subsystem in this invention. image 3 It is the schematic diagram of SINS / SAR / CNS integrated navigation in this invention.
[0172] The mathematical model of SINS / SAR / CNS integrated navigation system is as follows:
[0173] (1) Equation of state: In the SINS / SAR / CNS integrated navigation system, due to the high positioning accuracy of SAR and CNS, the error is much smaller than that of SINS and does not accumulate over time. Therefore, in order to reduce the dimensionality of the system, the navigation errors of SAR and CNS are considered as Gaussian white noise, and not listed as the state quantity of the integrated navigation system. Only the system error of SINS is considered as the system of the SINS / SAR / CNS integrated navigation system. State quantity.
[0174] Select the northeast sky (E-N-U) geographic coordinate system g as the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More