

Quasi-circular fruit and vegetable picking end executor, method and robot
An end-effector, fruit and vegetable technology, applied in the directions of picking machines, harvesters, agricultural machinery and implements, etc., can solve problems such as not being practically applied, and achieve the effects of simple structure, convenient use, and damage avoidance.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
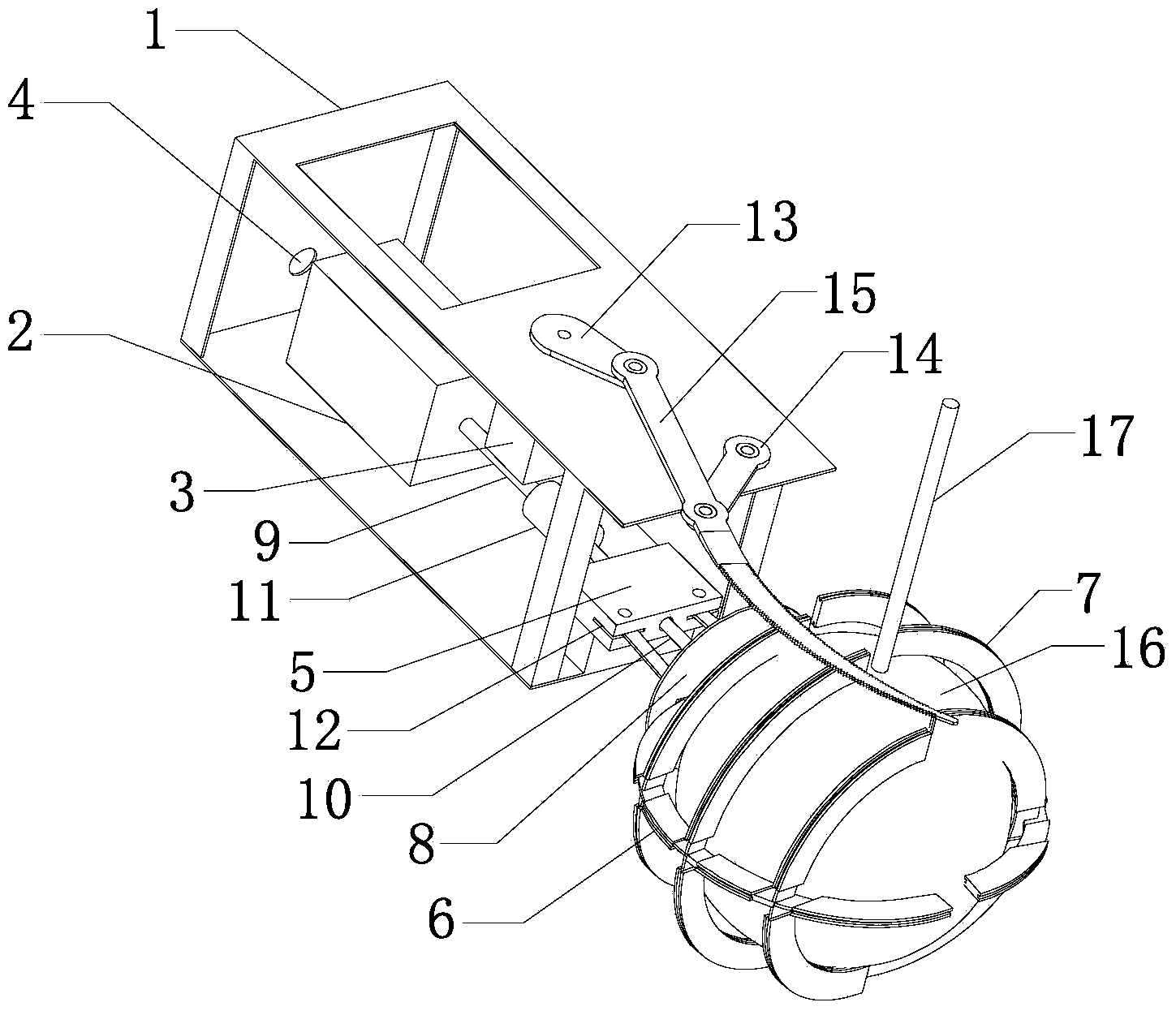
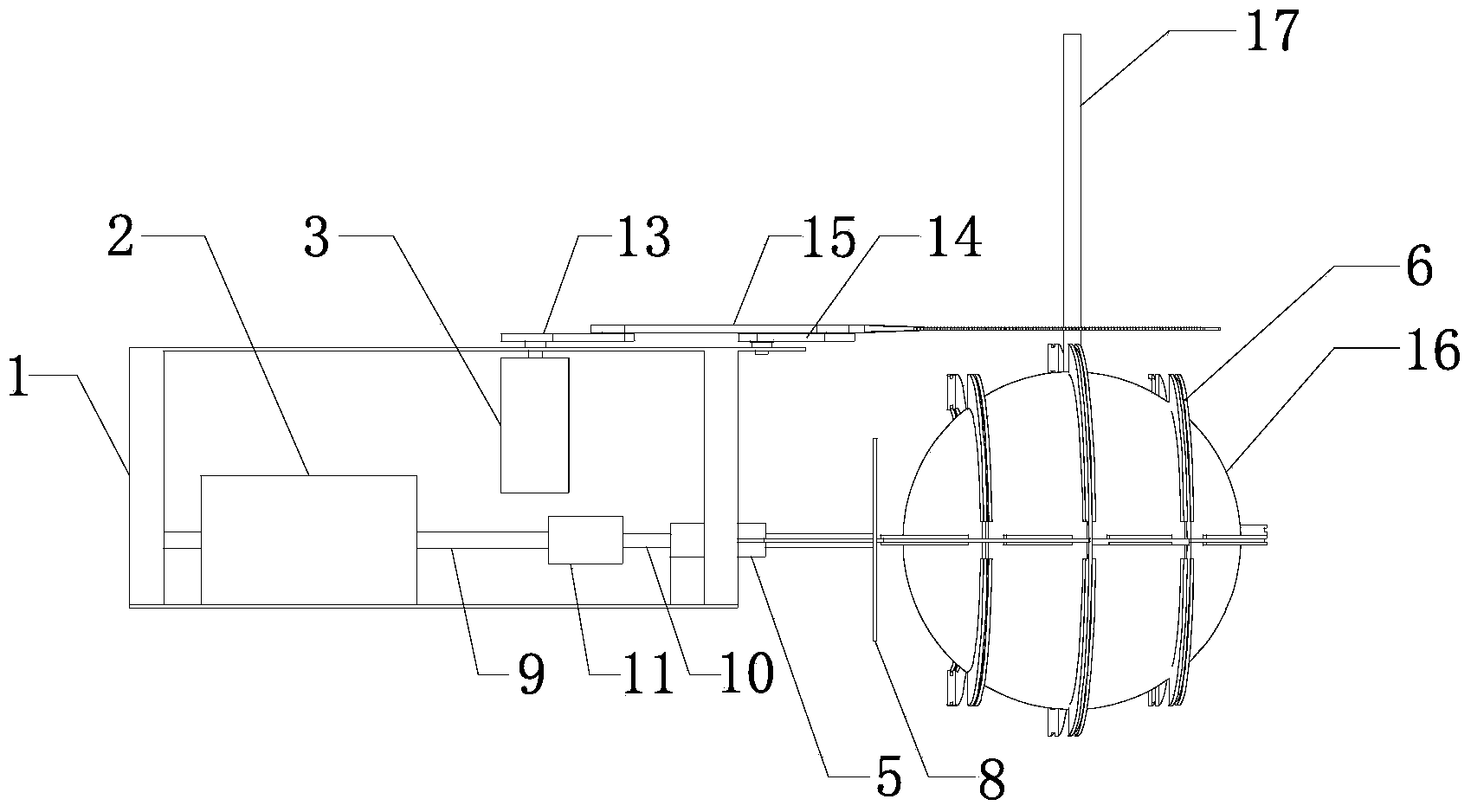
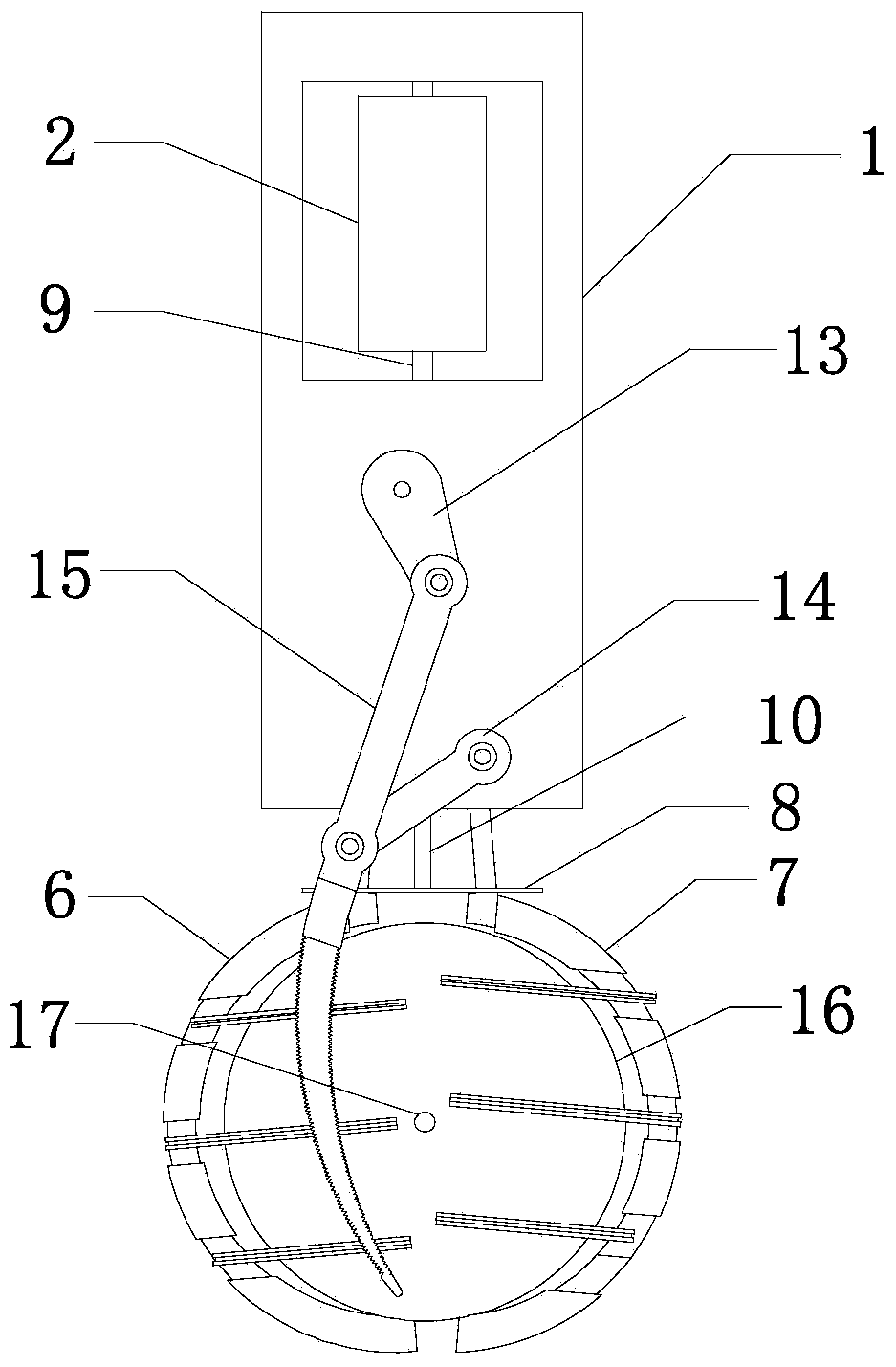
[0036] Such as Figure 1-Figure 3 As shown, the round fruit and vegetable picking end effector of this embodiment includes a box body 1, a clamping mechanism and a shearing mechanism. The bottom plate in the box body 1 is equipped with an electromagnet 2, and the top plate is equipped with a motor 3. One side of the box body 1 is provided with an opening 4, and the wires of the electromagnet 2 and the motor 3 pass through the opening 4 on one side of the box body 1 and are connected to an external power supply; the clamping mechanism includes an elastic movement assembly, a fixed block 5. The left claw mechanical finger 6, the right claw mechanical finger 7, and the sliding constraining disc 8, the elastic movement assembly includes a main shaft 9, a parallel shaft 10 and a coupling 11, and the main shaft 9 is provided with a return spring, and the One end of the main shaft 9 passes through the center of the electromagnet 2, and the other end is connected to one end of the par...
Embodiment 2
[0054] Such as Figure 5 As shown, the round-like fruit and vegetable picking robot of this embodiment includes a robot body structure 18 and a binocular camera mechanism 19 fixed on the robot body structure 18. Device, now the circular fruits and vegetables 16 on the test platform 20 are grasped and cut experiments.
[0055] The working principle of the round fruit and vegetable picking robot of this embodiment during the experiment is as follows:
[0056] In order to realize accurate grasping and picking of different types of round fruits 16, the round fruits and vegetables 16 are placed on the test platform 20, and then the binocular camera mechanism 19 is used to collect the images of the fruits and vegetables 16 on the test platform 20. Positioning determines the spatial coordinates of the center of mass of the target fruit and vegetable 16, and feeds back to the robot body structure 18. The robot body structure 18 moves to the positioned position through the manipulator...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More