

Permanent magnet synchronous motor rotor position observation system for restraining position pulsation observation errors and observation method thereof
A technology of permanent magnet synchronous motor and observation error, applied in control systems, control generators, vector control systems, etc., can solve problems such as the inability to effectively reduce the 6th harmonic
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
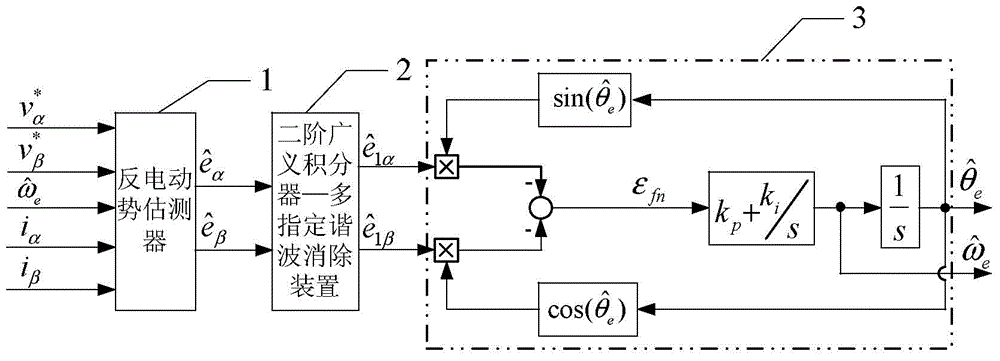
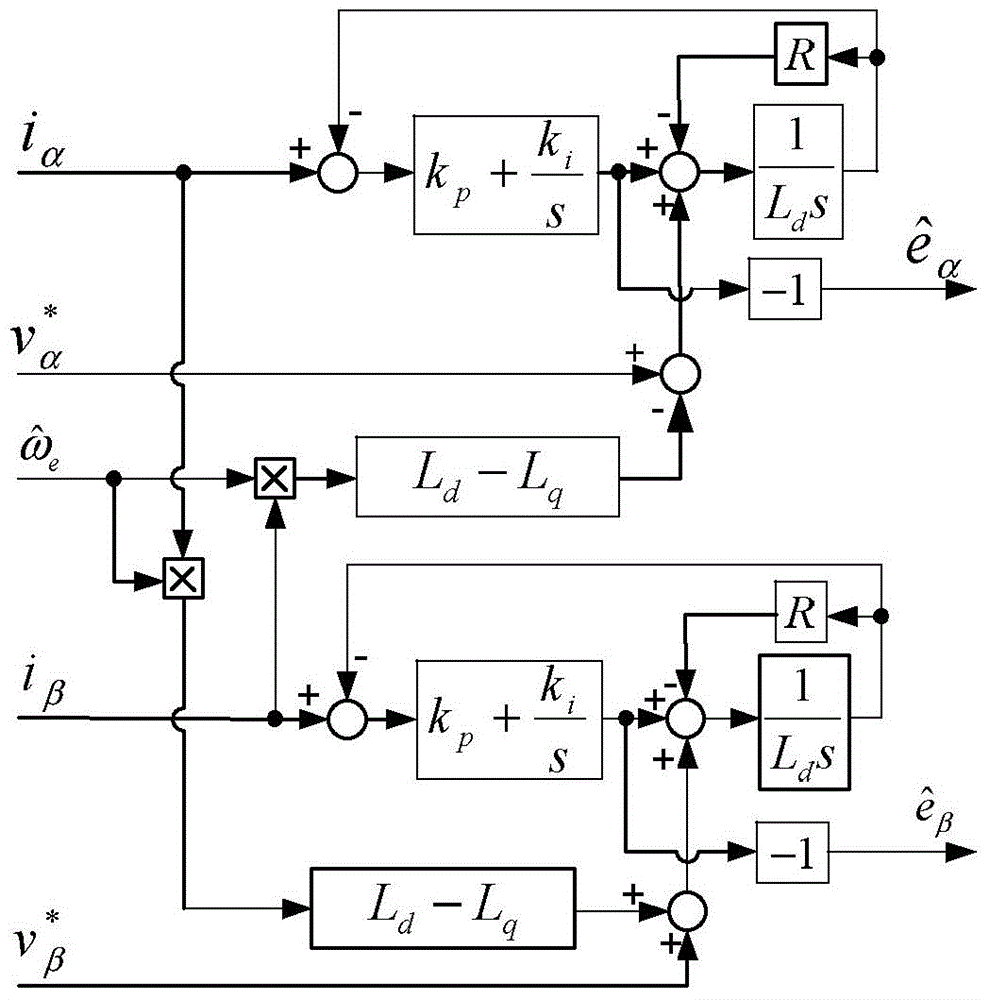
[0048] Specific implementation mode one: the following combination figure 1 , figure 2 This embodiment is described. A permanent magnet synchronous motor rotor position observation system that suppresses position pulsation observation errors described in this embodiment includes a back electromotive force estimator, a multi-designated harmonic elimination device based on a second-order generalized integrator, and a positive Interlocked phase-locked loop; Back EMF estimator 1 includes two proportional integral units, five subtractor units, one adder unit, four proportional gain units, two multiplier units, two with coefficient 1 / L d Integral unit 1 / L d s and two inverter cells;
[0049] The back electromotive force estimator 1 is respectively provided with the stator voltage of the α-axis under the two-phase static coordinates Input port, stator voltage of β axis Input port, stator current i of α-axis α Input port, stator current i of β axis β Input ports and rotor ang...
specific Embodiment approach 2
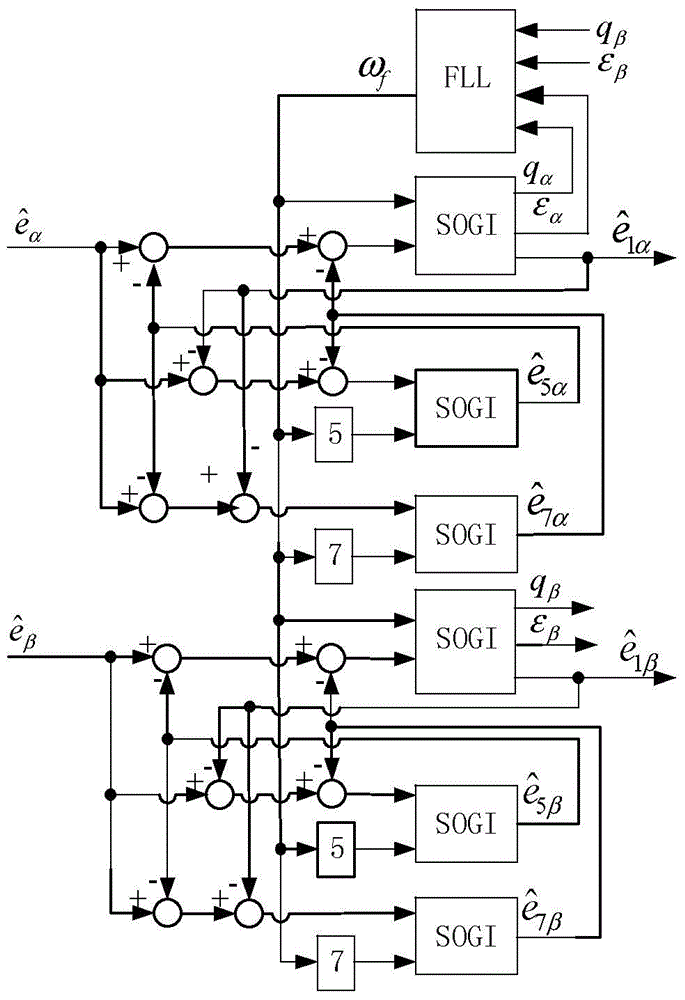
[0074] Specific implementation mode two: the following combination image 3 Describe this embodiment, this embodiment will further explain Embodiment 1, the multi-designated harmonic elimination device 2 based on the second-order generalized integrator described in this embodiment includes six second-order generalized integrator units, a frequency-locked loop unit, Four proportional gain units and twelve subtractor units;
[0075] The first second-order generalized integrator unit, the second second-order generalized integrator unit and the third second-order generalized integrator unit sequentially output the extracted α-axis estimated back electromotive force fundamental wave Estimating the 5th Harmonic of Back EMF by α-axis and α-axis to estimate the 7th harmonic of back EMF
[0076] The fourth second-order generalized integrator unit, the fifth second-order generalized integrator unit and the sixth second-order generalized integrator unit sequentially output the extr...
specific Embodiment approach 3
[0115] Specific implementation mode three: the following combination Figure 4 Describe this embodiment, this embodiment will further explain the second-order generalized integrator unit described in Embodiment 2, the second-order generalized integrator unit described in this embodiment is the first one described in Embodiment 2 The second-order generalized integrator unit is described as an example. The second-order generalized integrator unit described in this embodiment includes a No. 1 subtractor unit, a No. 2 subtractor unit, a proportional gain unit, a No. 1 multiplier unit, and a No. 2 multiplication unit. unit, integration unit No. 1 and integration unit No. 2;
[0116] The α axis estimated back electromotive force signal input terminal of the 5th and 7th harmonics of the first subtractor unit is the α axis estimated back electromotive force of the 5th and 7th harmonics of the second-order generalized integrator unit a signal input terminal, and the signal at the inpu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More