

Robot-assisted multifunctional instrument arm for minimally invasive surgery
A robot-assisted, minimally invasive surgery technology, applied in the field of robotics, can solve problems that affect the accuracy of surgical operations, the operator is prone to fatigue, and affects the judgment of doctors, etc., and achieves the effects of convenient transfer and fixation, compact structure, and light structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention is described in more detail below in conjunction with accompanying drawing example:
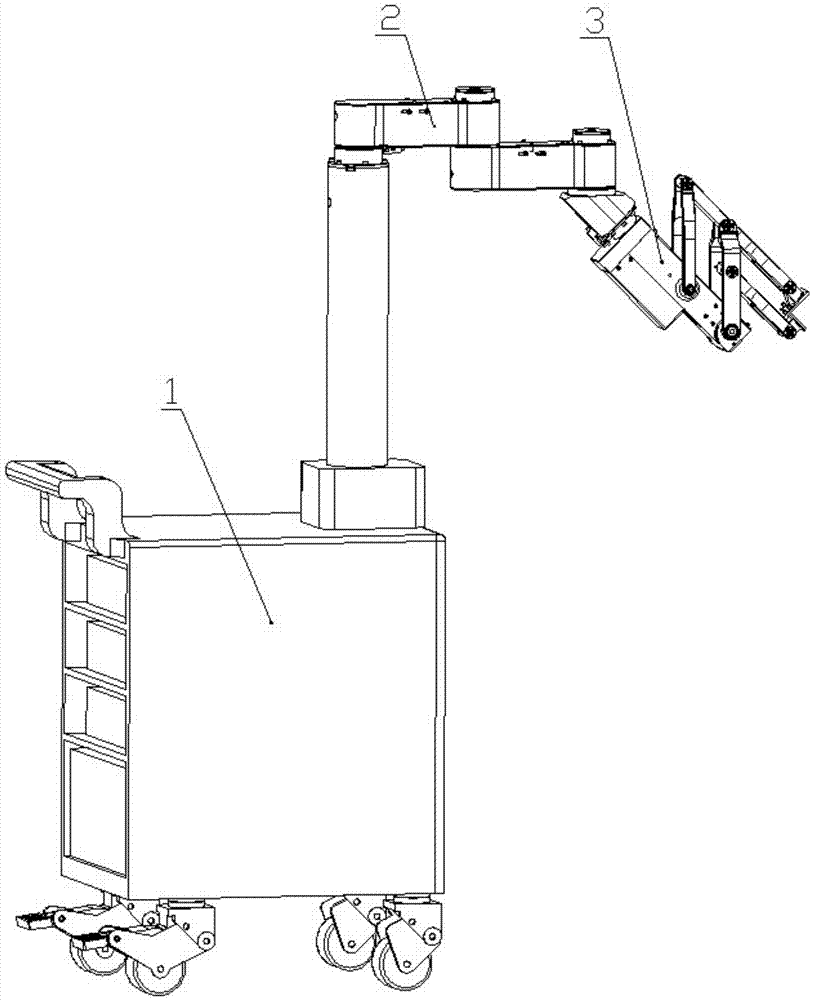
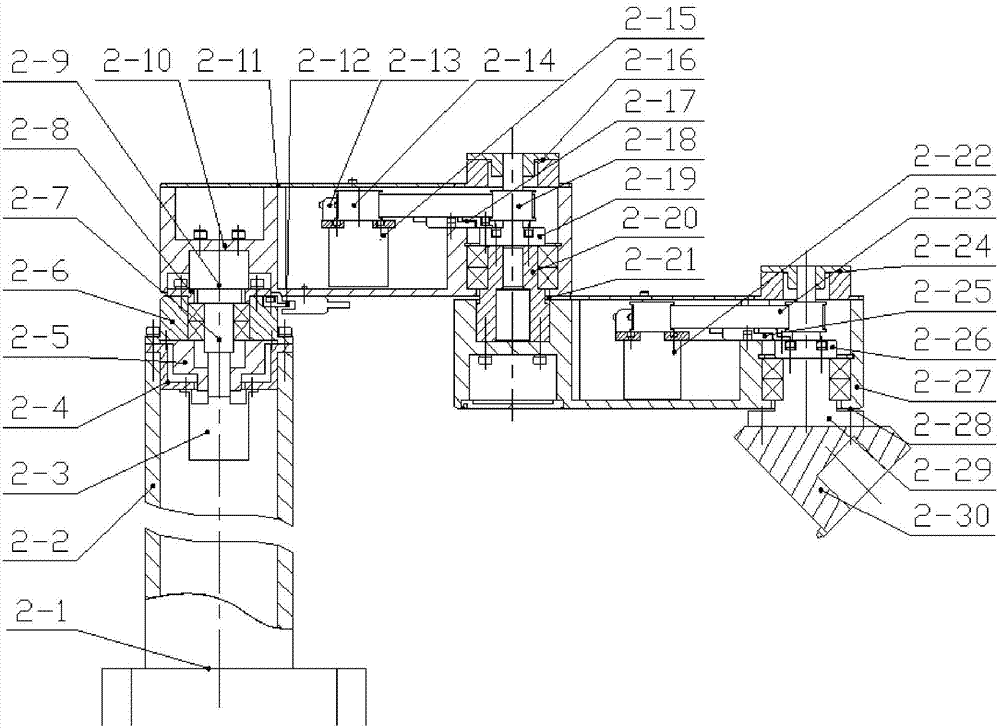
[0023] combine figure 1 ~4, the present invention mainly is made up of following three parts: main control chassis 1, terminal position adjustment mechanism 2, terminal posture adjustment mechanism 3; Equipment such as box body, industrial control computer main frame is equipped in the main control chassis 1, in order to control the whole The motion system implements control; the terminal position adjustment mechanism 2 is composed of an active lifting joint and 3 passive rotating joints, and is mainly used to adjust the position of the terminal control point; the terminal attitude adjustment mechanism 3 is composed of 2 active rotating joints, used for After the position of the end control point is determined, adjust the attitude of the point. The specific composition of each part is as follows:
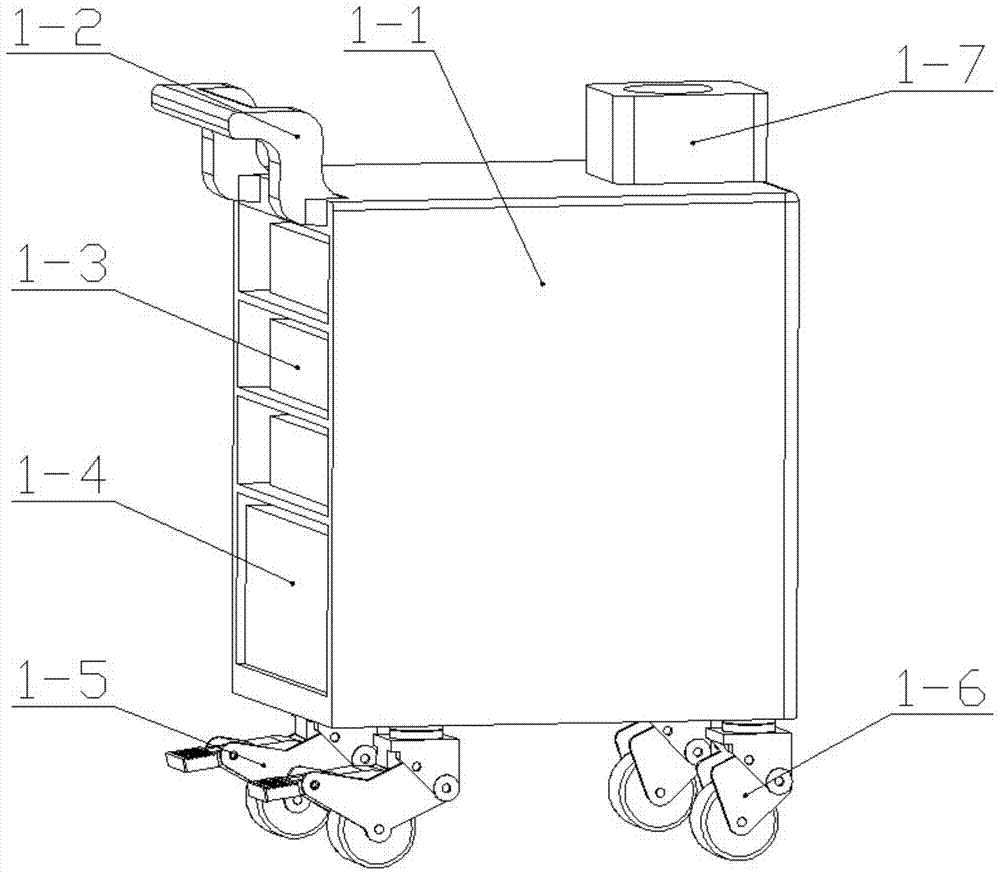
[0024] Main control cabinet 1: cabinet 1-1, push armrest 1-2, co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More