

Self-regulation-based unscented Kalman filter (UKF) misalignment angle initial-alignment method
A technology of initial alignment and misalignment angle, which is applied in the field of filtering, can solve the problems of poor robustness of UKF filtering, etc., and achieve the effect of increasing robustness and improving anti-interference ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0023] Embodiments of the present invention provide a new method for initial alignment of UKF with large misalignment angles based on self-adjustment, including:
[0024] Step 1. According to the error characteristics of the inertial navigation system, a nonlinear error model of filtering is established. The nonlinear error model includes: a state equation and a measurement equation.
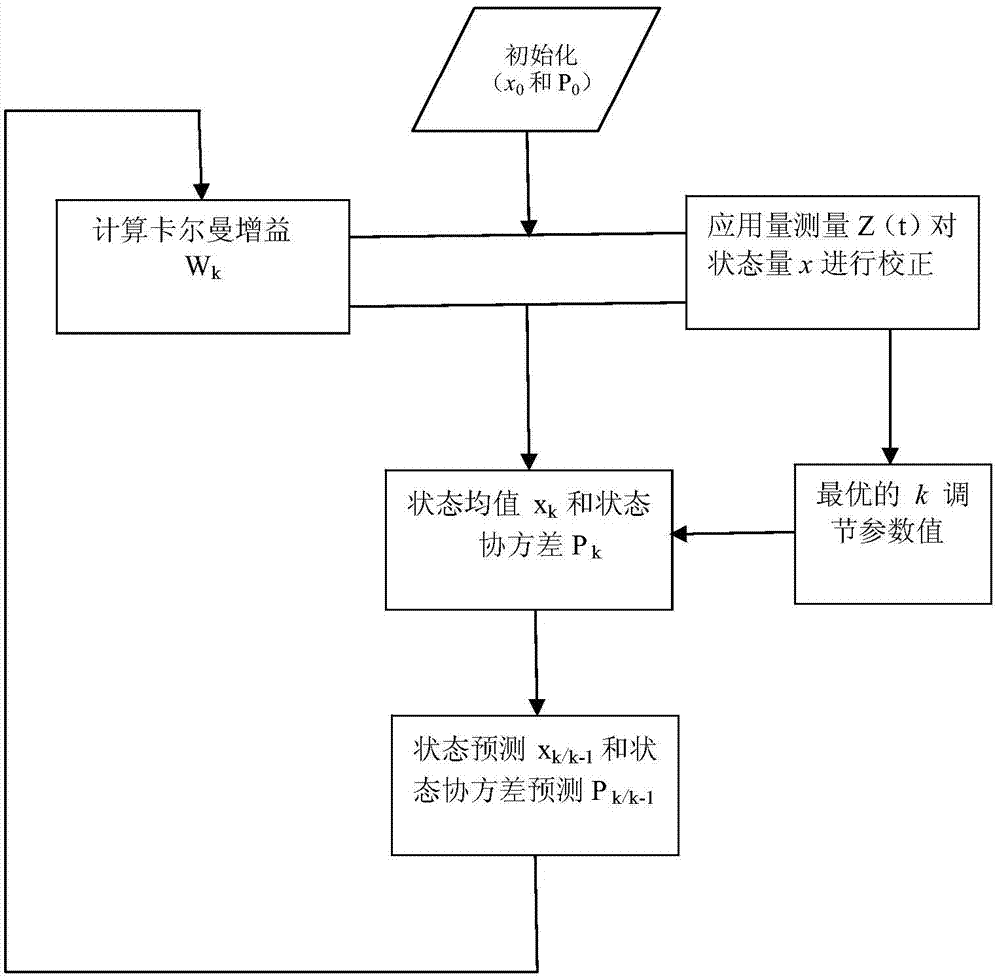
[0025] Step 2: Set the initial filter value. make and P 0|-1 =P 0 . where x 0 is the initial value of the state variable, P 0 is the initial covariance of the state variables.
[0026] Step three, according to the formula Select the optimal value of the adjustment parameter (κ is the free adjustment parameter value), where K={κ:κ min ∈R,κ max ∈R,κ min ≤κ≤κ max} are some fixed possible values that satisfy the positive definite covariance matrix of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More