

Vehicle ambient environment three-dimensional reconstruction method for night vision
A technology of three-dimensional reconstruction and surrounding environment, applied in image data processing, 3D modeling, instruments, etc., can solve problems such as unavailability, inability to meet driver assistance, and poor robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
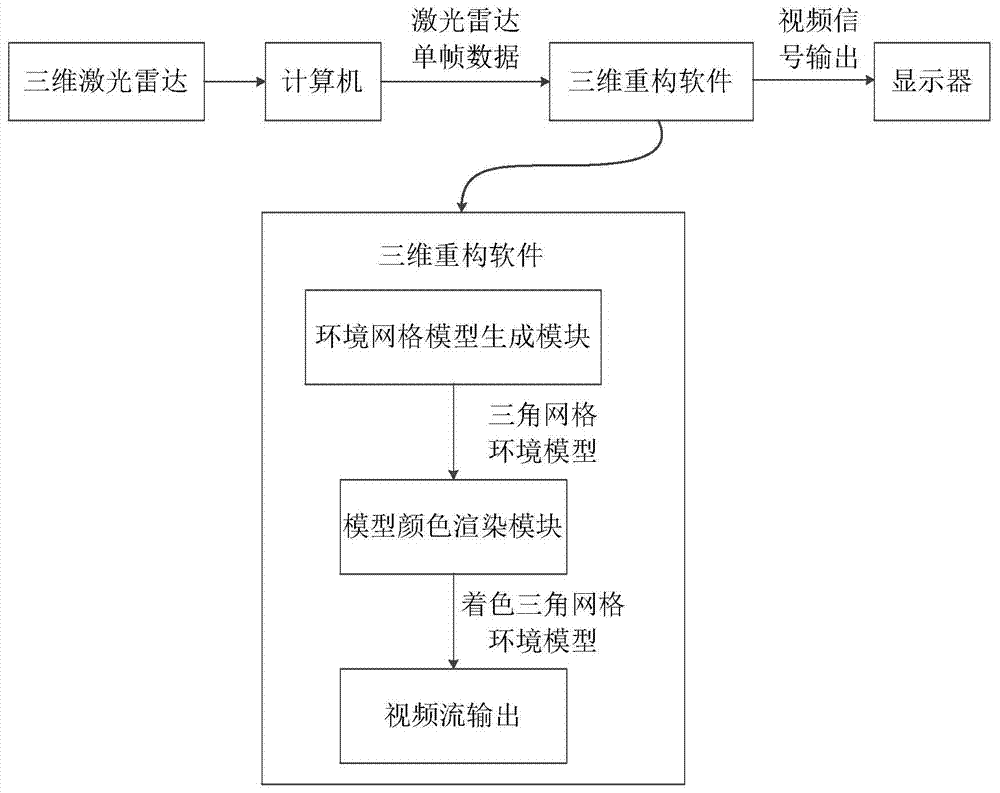
[0053] figure 1 It is a logical structure diagram of the night vision system based on the three-dimensional laser radar sensor constructed in the first step of the present invention. The hardware of the system is composed of a vehicle-mounted 3D lidar sensor (frame rate above 10Hz, output greater than 500,000 points per second), computer and display; the software of the system is 3D reconstruction software, which is generated by the environment grid model and the model color Rendering module composition. The 3D lidar sensor monitors and perceives the surrounding environment of the vehicle in real time, and sends the 3D point cloud obtained from the surrounding environment to the computer in a fixed format; The cloud performs three-dimensional reconstruction to generate a three-dimensional environment image around the vehicle, conver...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More