

Under-actuated picking tail end executing device and method
An end-effector, under-actuated technology, applied in picking machines, agricultural machinery and implements, applications, etc., can solve the problems of long distance from the manipulator, difficult to grasp the grasping force, poor reliability of pneumatic transmission, etc. Overall structure size and weight, avoid goaf or fruit damage, improve the effect of dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
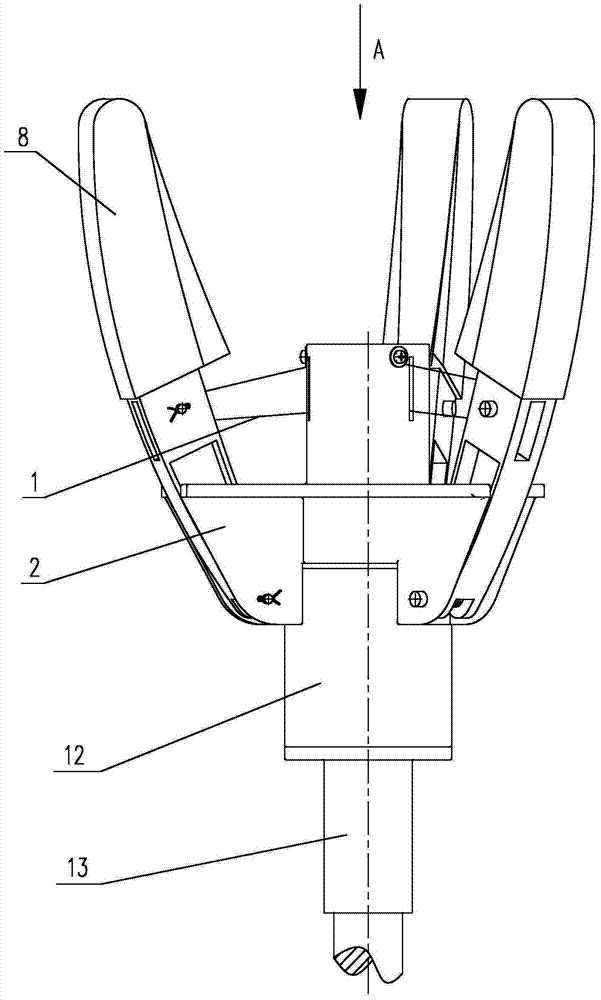
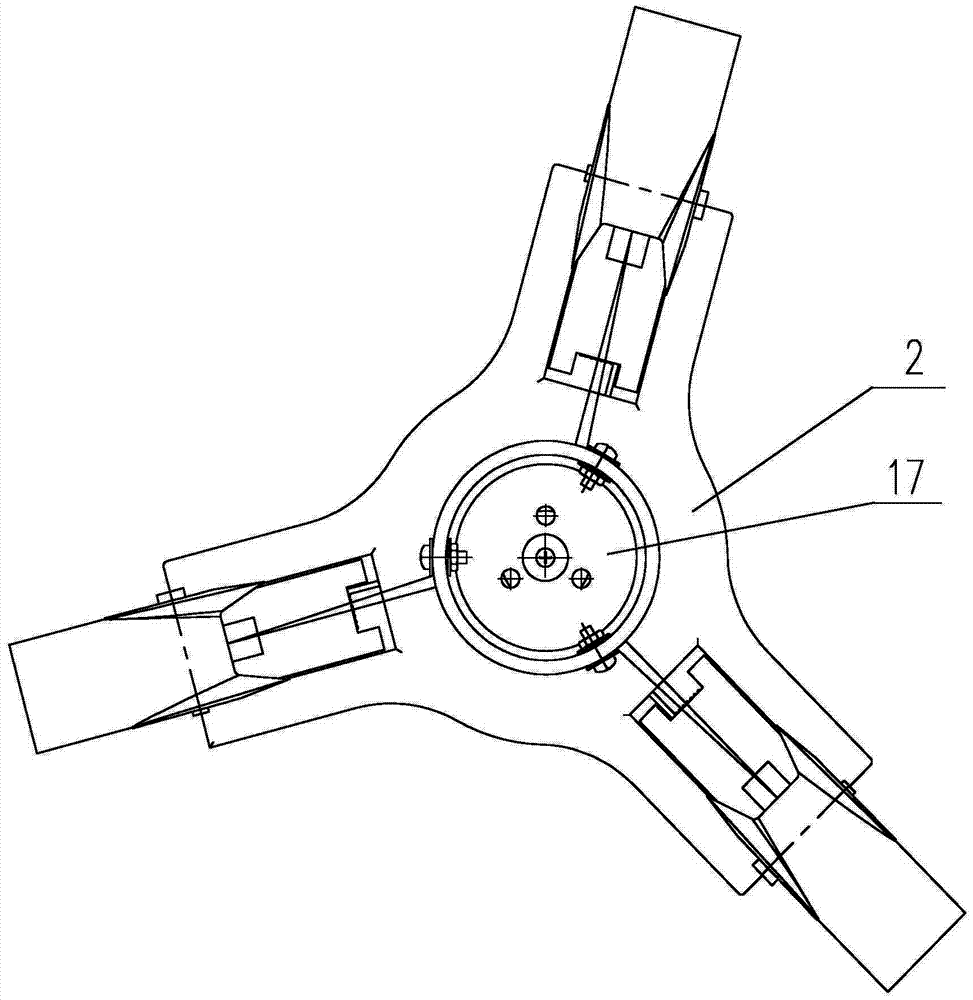
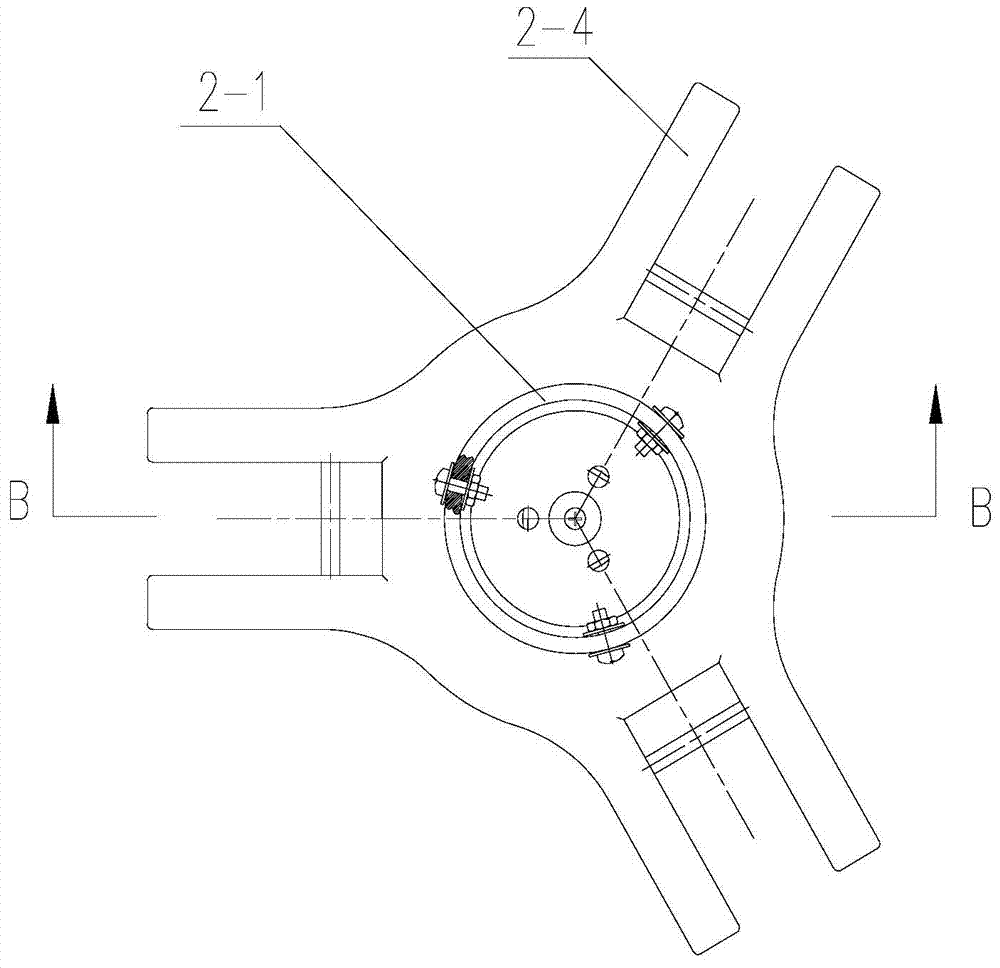
[0037] In this embodiment, an underactuated picking end effector, such as figure 1 or figure 2 As shown, it includes a hand actuator, a drive mechanism and a support assembly, and the hand actuator is connected to the drive mechanism through the support assembly; the hand actuator is a three-claw structure, including three claws, three hinge assemblies, Three sections of wire rope 1, a palm 2 and a pressure block 3 (see Figure 4 ), the three claws are evenly distributed on the peripheral edge of the palm, the bottom of each claw is installed on the palm through the corresponding hinge assembly, the pulley is set in the middle of each claw, each pulley is connected with the palm through a wire rope, and the bottom of the palm is connected to the driving mechanism through a pressure block connect. Wherein, the hand actuator is used to clamp and twist the spherical fruit, the driving mechanism is used to provide power for the hand actuator, and the support assembly is used to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More