

TDOF (three degree of freedom) external bone type finger rehabilitation robot
A rehabilitation robot and exoskeleton technology, applied in the field of robotics, can solve the problems of less freedom, unfavorable loading and unloading, complex transmission structure, etc., and achieve the effect of reducing size, small size, and restoring motion function
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
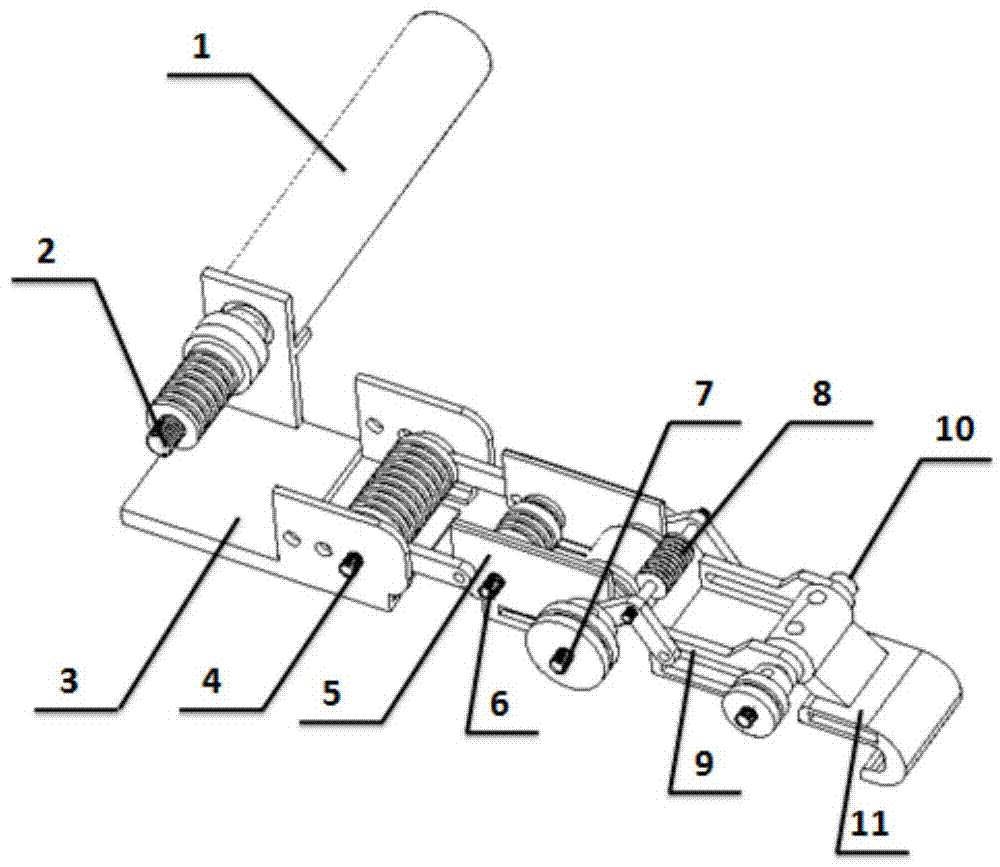
[0035] Embodiment: a kind of three-degree-of-freedom exoskeleton type finger rehabilitation robot (see figure 1), characterized in that it includes a motor drive unit, a transmission unit and an execution unit; wherein, the input end of the motor drive unit receives the driving signal sent by the EEG analysis workstation, and its output end is connected to the input end of the transmission unit; The input end of the execution unit is connected with the output end of the transmission unit, and the output end is in contact with the patient's finger, and the patient's finger is moved by force.
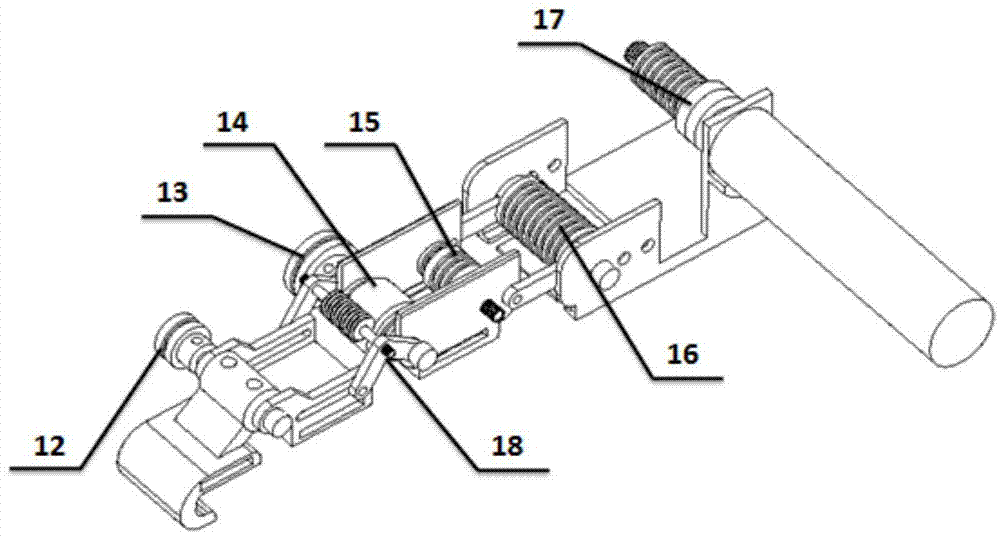
[0036] The motor drive unit (see figure 2 , image 3 ) includes a motor 1, a drive shaft 2, a palm part 3, and a parallel groove shaft 17; the transmission unit includes a rotation shaft I4, a rotation shaft II6, a rotation shaft III7, a threaded shaft 8, a rotation shaft IV10, a transmission wheel I12, and a transmission wheel II13 , transmission wheel III14, transmission wheel IV15, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More