

Robot motion estimation method based on dense optical flow
A technology of robot movement and dense optical flow, applied in the field of robot vision, can solve the problems of low precision, limited camera function, poor robustness, etc., and achieve the effect of improving robustness, improving precision, and simplifying the conversion relationship
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
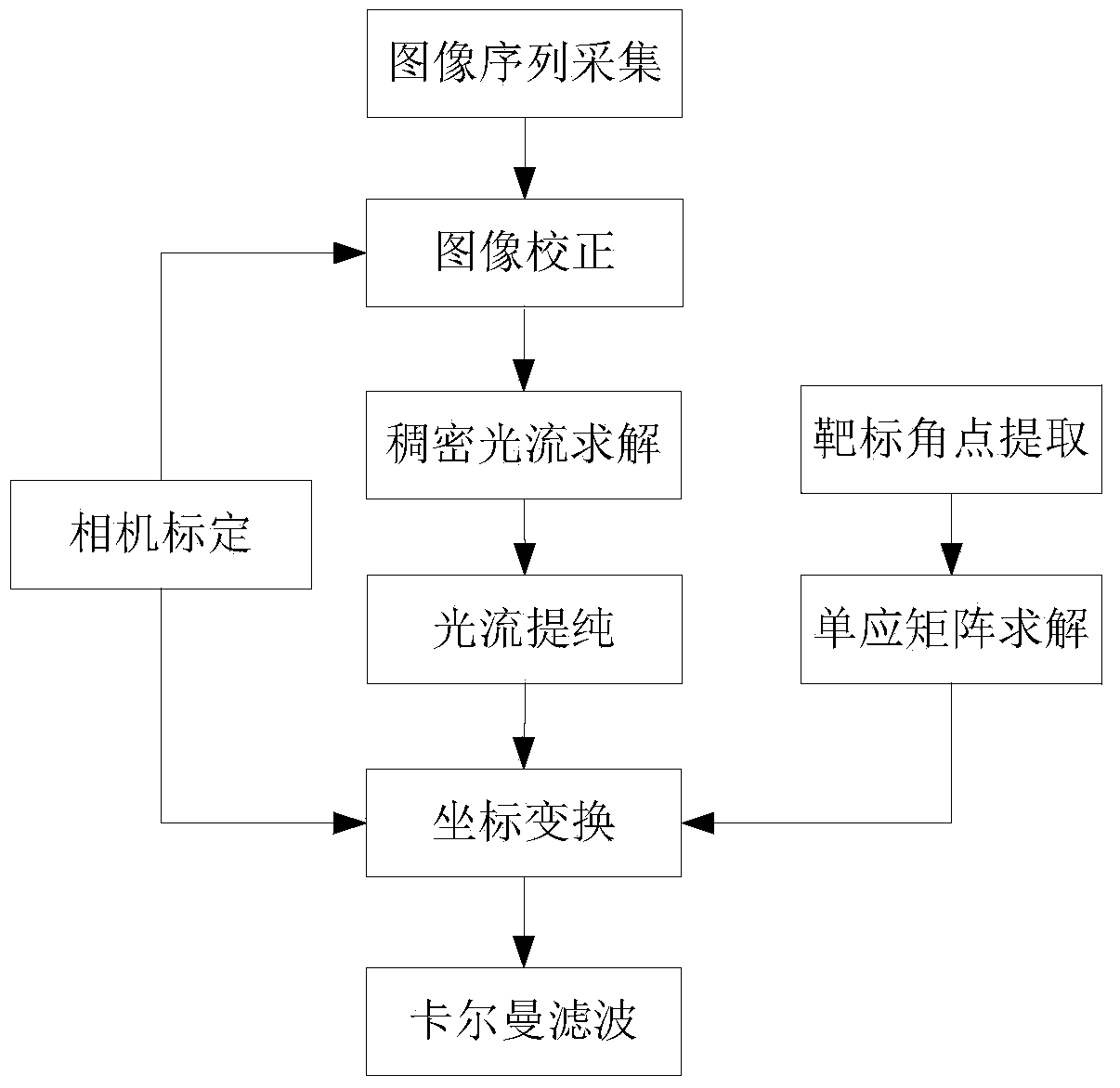
[0030] The flow chart of the robot motion speed measurement method based on dense optical flow is as follows: figure 1 As shown, it specifically includes the following steps.
[0031] Step 1, calibrate the internal and external parameters of the camera.
[0032] (1) Print a target template with a size of A2, and the interval of feature points on the target is 30mm.
[0033] (2) Shoot the target from multiple angles. When shooting, try to make the target occupy the screen as much as possible, and ensure that every corner of the target is in the screen, and shoot a total of 9 target images.
[0034] (3) Detect the feature points in the image, that is, every black intersection point of the target.
[0035] (4) Establish camera coordinate system, robot coordinate system and world coordinate system, as attached figure 2 As shown, the camera le...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More