

Linear feature extraction method based on laser sensor
A laser sensor and linear feature technology, applied in the field of artificial intelligence, can solve the problems of poor robustness and low efficiency of linear parameters
Inactive Publication Date: 2014-05-07
PLA SECOND ARTILLERY ENGINEERING UNIVERSITY
View PDF5 Cites 18 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
However, the traditional segmentation and merging methods have the problems of poor robustness to straight line parameters and low efficiency.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment
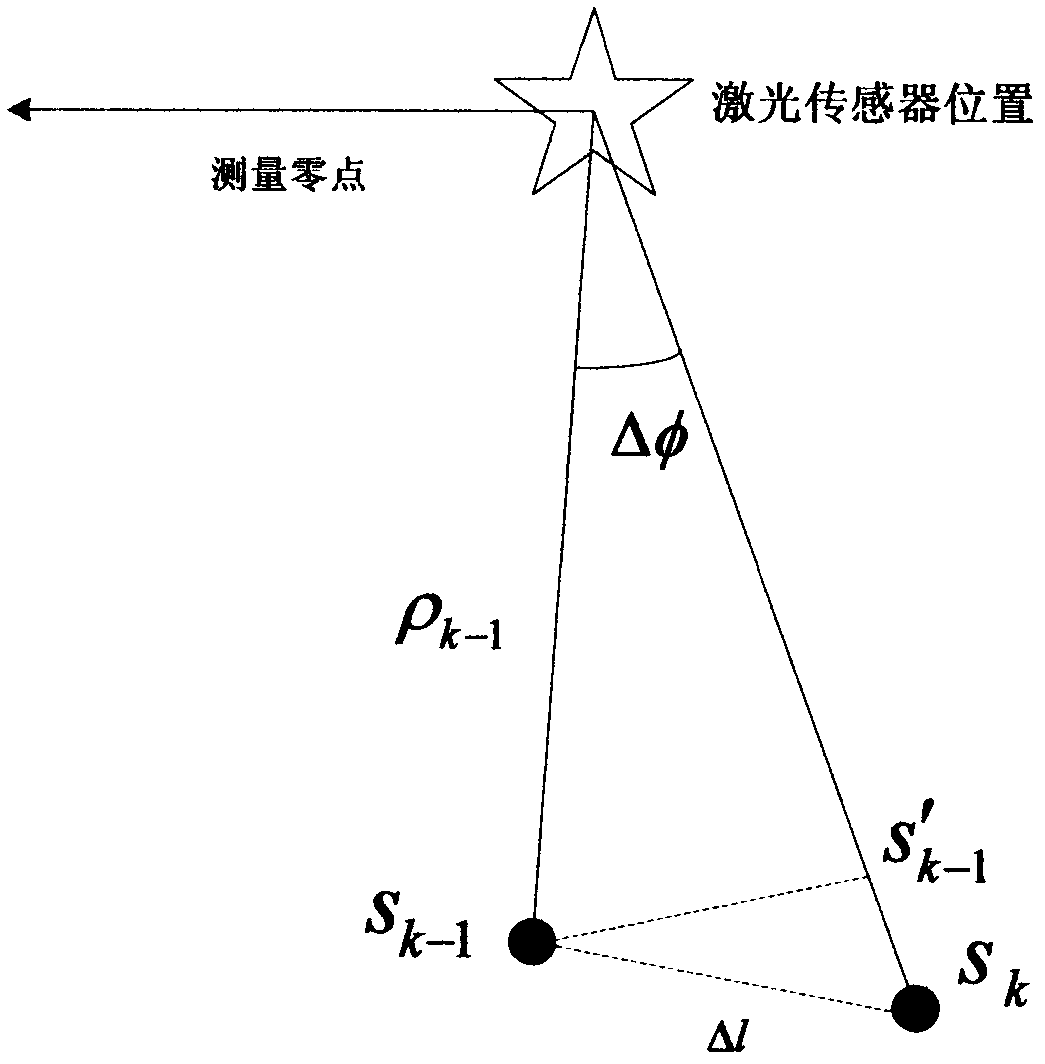
[0053] In this embodiment, the SICK200 industrial 180° distance laser sensor of the German SICK company was used in the experiment done in the laboratory environment of 6m×6m. LMS lidar measures the distance to surrounding obstacles by calculating the round-trip time of the laser, that is, the lidar transmitter emits a beam of laser light, which is reflected when the laser encounters an obstacle; the laser radar receiver records the reflected light, The distance between the obstacle and the lidar is calculated by the time from when the laser is emitted to when it is reflected back to the lidar.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
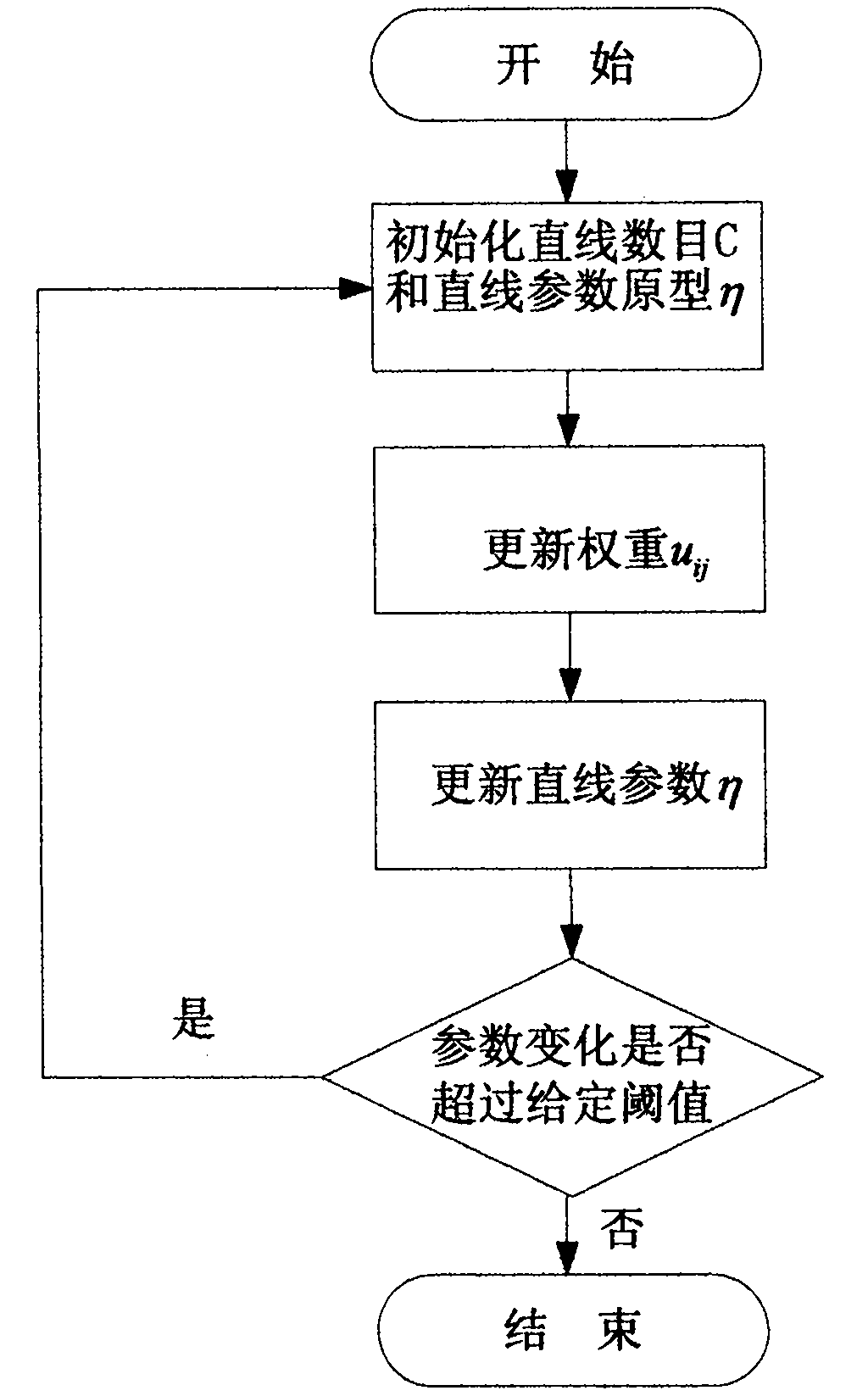
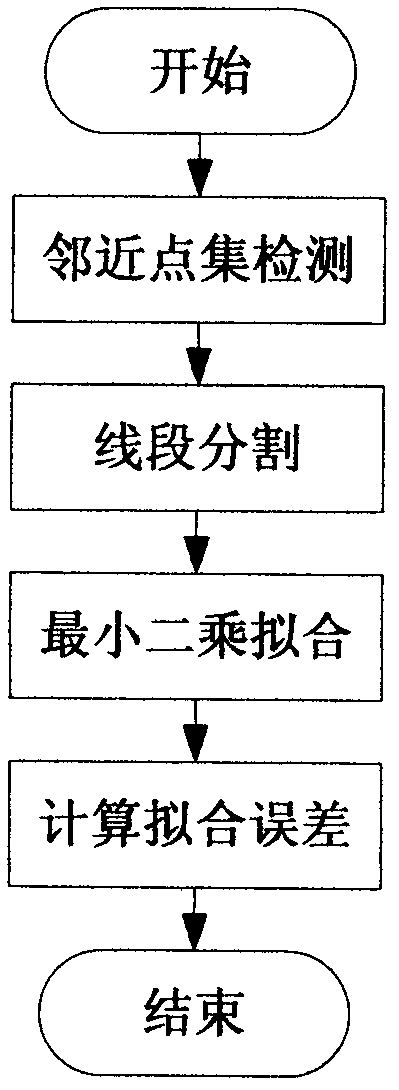
The invention relates to a laser image linear feature extraction method. On the basis of a split-and-merge method, the efficiency of the method is improved through adaptive neighbor point set detection, line segment cutting is carried out with the use of a split-and-merge fuzzy method to improve the sensitivity of the method to parameters, and finally, a least square method is adopted to fit parameters under a polar coordinate system of each line segment in an environment. The method comprises the four major steps of neighbor point set detection, line segment cutting, least square linear fitting and linear fitting error calculation. The method implementation result shows that: when a line segment contains a large number of points, the result is accurate, the vast majority of line error is very small, the polar radius error is less than 1mm, the angle error is less than 0.01rad, and the fitting effect is good. Compared with a traditional straight line extraction method, the linear feature extraction method based on the laser sensor has the following advantages: (1) the number of iteration times of the method is reduced and the efficiency of the method is improved; (2) the robustness of the method is greatly improved; and (3) the line segment extraction precision is improved.
Description
technical field [0001] The invention belongs to the technical field of artificial intelligence and relates to a method for extracting straight line features of laser images. Background technique [0002] With the rapid development of computer technology and artificial intelligence technology, mobile robot technology has also made great achievements, and is widely used in home services, space exploration, deep sea salvage, mineral exploration, security medical treatment, military reconnaissance and other fields. In the research of robot-related technologies, the problem of Simultaneous Localization and Mapping (SLAM) is one of the key problems in robotics, and it is even known as the "holy grail" in the field of mobile robot research. The straight line is one of the most commonly used feature descriptions in robot SLAM problems, because choosing it as the environmental feature for robot positioning has many advantages, such as: straight lines exist more in indoor environments...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01S7/493
CPCG01S7/493G01S17/32
Inventor张国良敬斌徐君王俊龙曾静孙一杰安雷陈励华
OwnerPLA SECOND ARTILLERY ENGINEERING UNIVERSITY