

Four-degree-of-freedom servo manipulator
A technology of manipulators and degrees of freedom, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex structure, short life of manipulators, high price, etc., achieve the effect of small size, control of external dimensions, and improvement of economic benefits
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the accompanying drawings, but does not constitute any limitation to the present invention. Similar component numbers in the accompanying drawings represent similar components. As mentioned above, the present invention provides a rail-type manipulator for grasping and transferring materials.
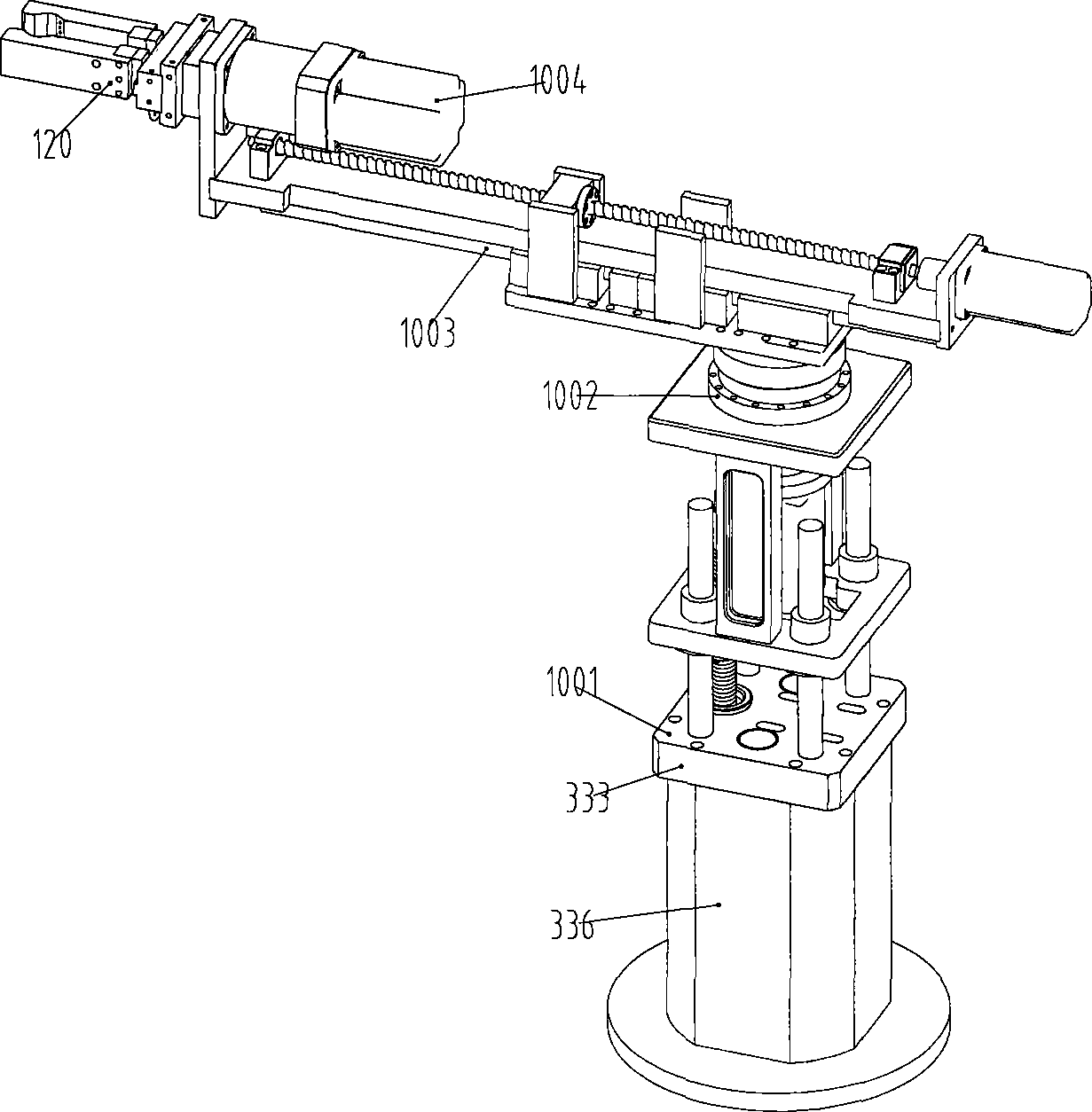
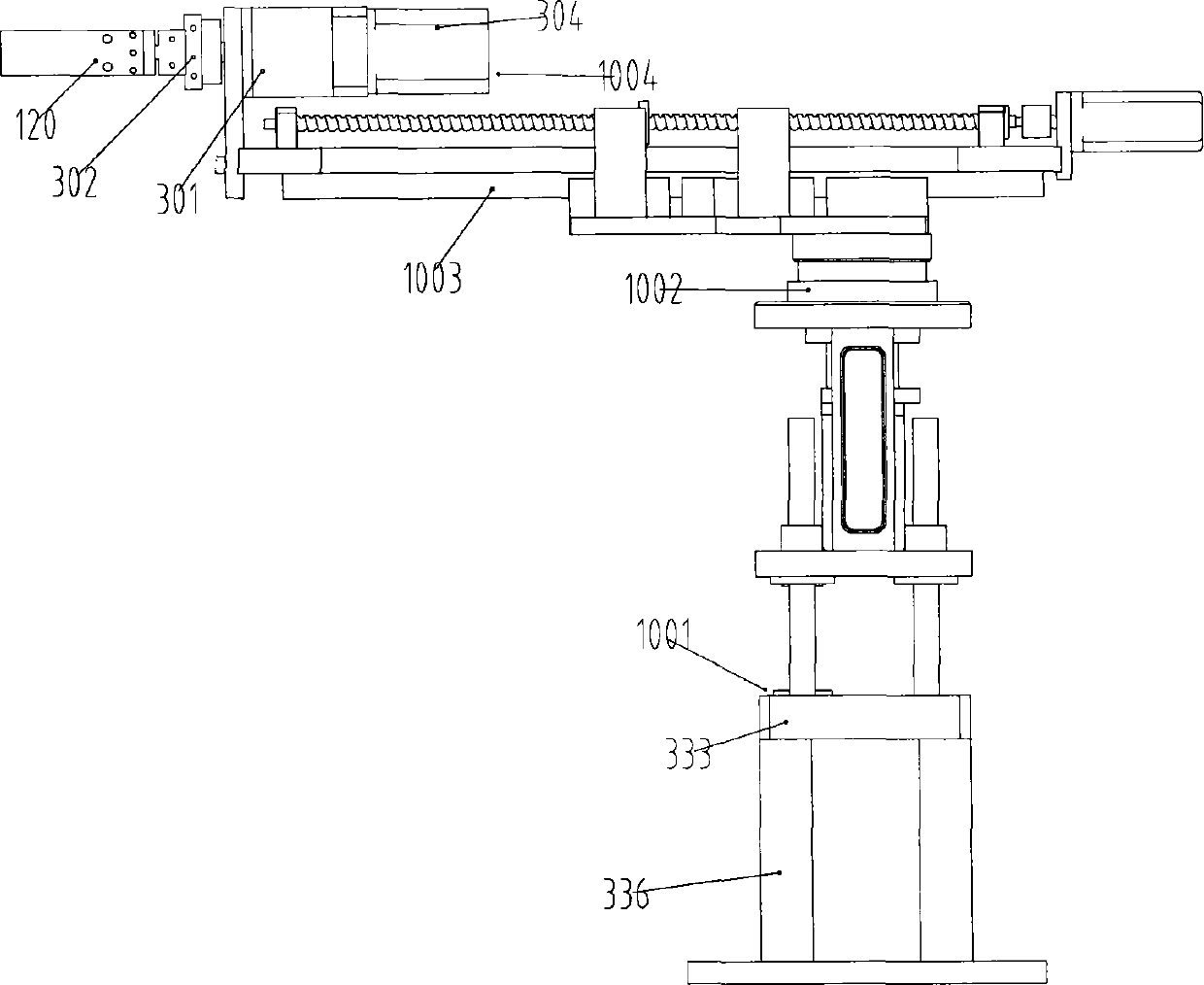
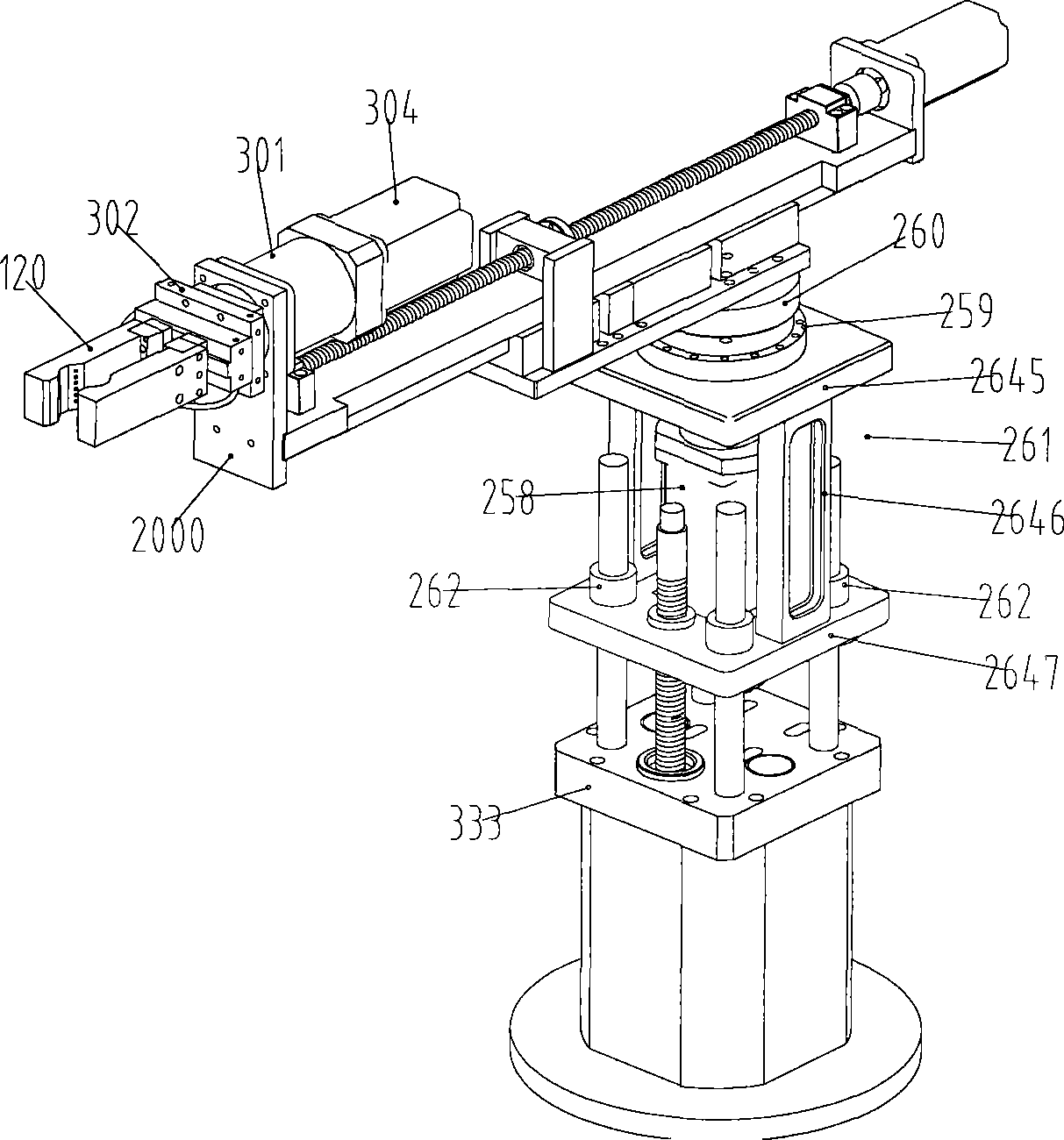
[0030] figure 1 , figure 2 , image 3 It is a structural schematic diagram of a four-degree-of-freedom servo manipulator of the present invention, Figure 4 , Figure 5 It is a structural schematic diagram of the lifting arm of the four-degree-of-freedom servo manipulator of the present invention, Figure 6 It is a structural schematic diagram of the linear arm of the four-degree-of-freedom servo manipulator of the present invention.
[0031] A four-degree-of-freedom servo manipulator, including a lifting arm 1001, a rotating arm 1002, a telescopic arm 1003, a torsion arm 1004, a base 336 and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More