

Multi-functional underwater operation robot
An underwater operation and robot technology, which is applied in the directions of underwater operation equipment, transportation and packaging, ships, etc., can solve the problems of incapable of comprehensive application, low water throughput efficiency, large volume and weight, etc., and achieves low cost and degree of automation. High, flexible structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
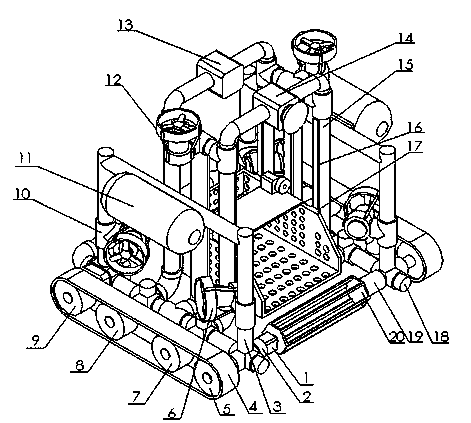
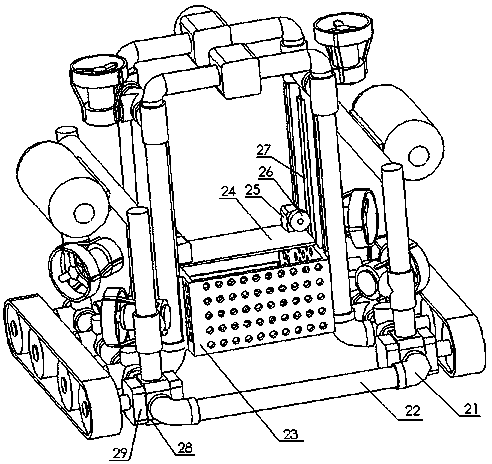
[0022] The main technical indicators of the robot described in the present invention are: crawling speed: 1.2m / s; length*width*height: 590*590*590 (mm); maximum diving depth: 7m propeller power: 220W; rated total power: 240W ; Collector lifting speed: 0.3m / s; Payload: 5kg; Survey range: 5 meters; Pump power: 150W; Filter mesh density: 400 mesh / square centimeter.
[0023] The robot can be used for military reconnaissance, underwater monitoring; marine oil pipeline inspection; cross-river, cross-river pipeline inspection, hull overhaul, ship bottom exploration, waterway troubleshooting, port operations, drilling platform underwater structure overhaul; underwater archaeology, underwater Shipwreck investigation, etc.; the cleaning module is developed separately for the cleaning of swimming pools, pools, and water tanks.
[0024] The robot is multi-mode and multi-functional, and its modules can be independently developed. It can be used in many industries such as military and civi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More