

Device and method for controlling self-localization, butting and charging of high-voltage line inspection robot
A line patrol robot and autonomous positioning technology, applied in the direction of circuit devices, battery circuit devices, overhead lines/cable equipment, etc., can solve problems such as low efficiency, delay in returning images from dead-angle videos, and extrusion damage of charging plugs and charging stands.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0101] In order to facilitate those of ordinary skill in the art to understand and implement the present invention, the present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the implementation examples described here are only used to illustrate and explain the present invention, and are not intended to limit this invention.
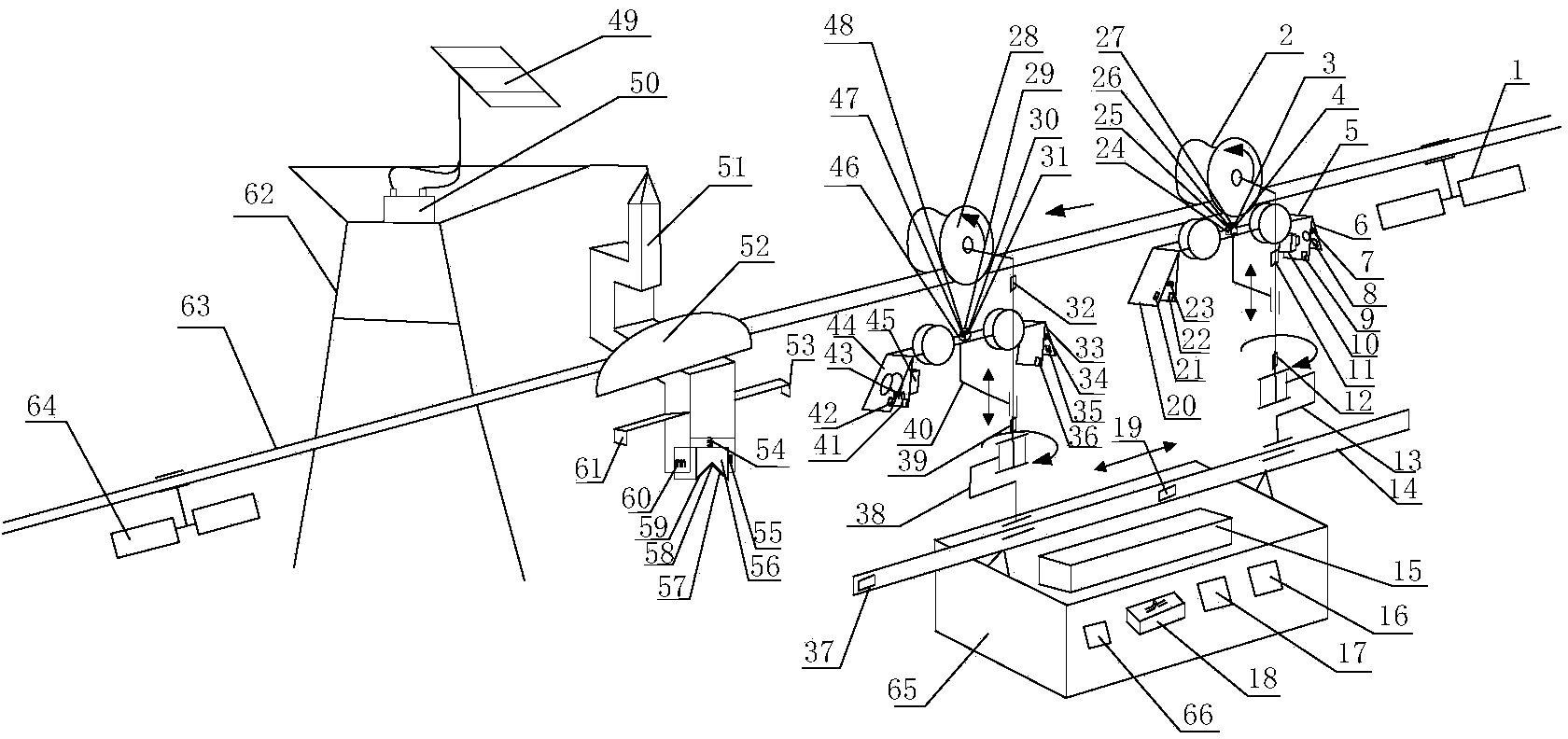
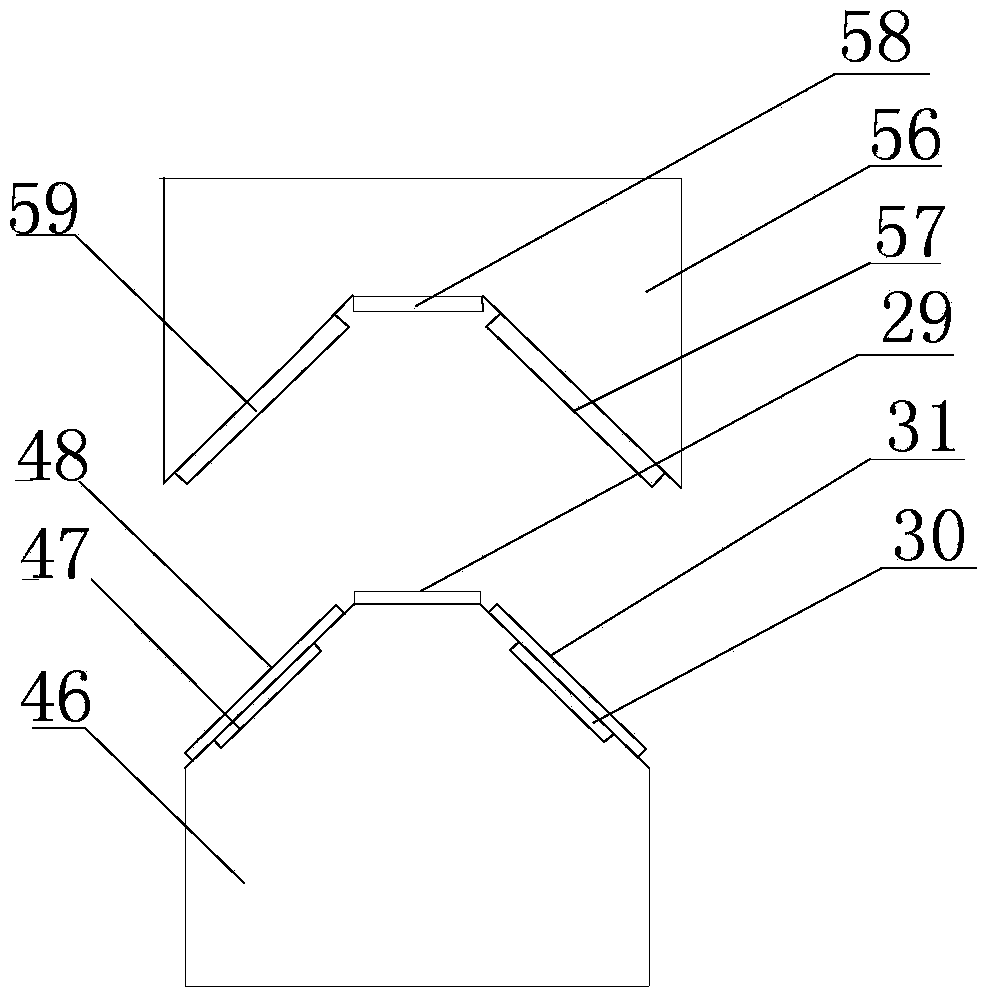
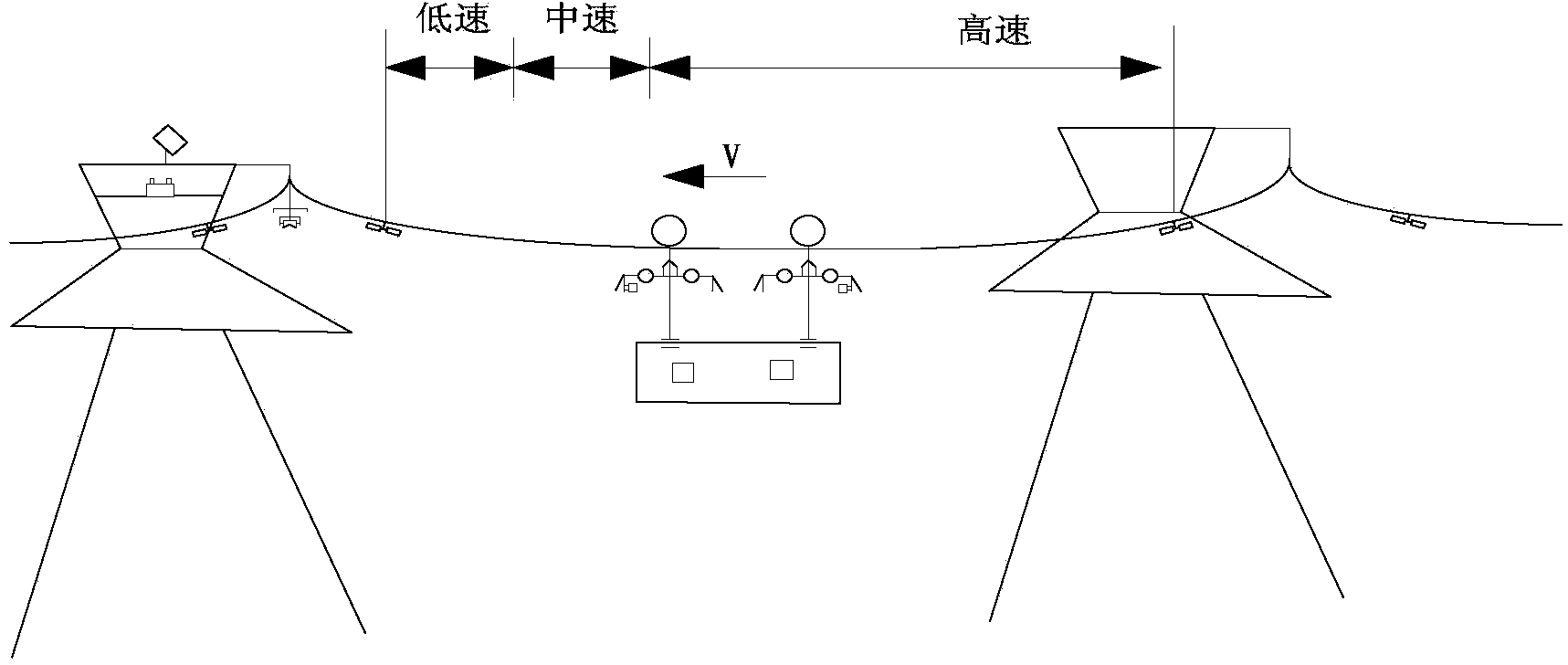
[0102] please see figure 1 , figure 2 , image 3 , Figure 4 and Figure 5 , the technical solution adopted by the control device of the present invention is: a control device for autonomous positioning and docking charging of a high-voltage line patrol robot, including: a small side anti-vibration hammer 1 and a large side anti-vibration hammer 64, which are arranged on the ground wire 63, Symmetrically distributed on both sides of the C-shaped hanging board 51; the solar panel 49 is arranged on the ground wire cross arm of the high-voltage line tower 6...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More