

Three-freedom degree manipulator
A technology of manipulators and degrees of freedom, applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as narrow application range, high cost, impact of cylinders, etc., and achieve good adaptability and large clamping force.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
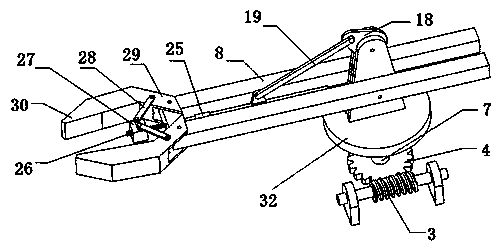
[0021] As shown in the figure, the three-degree-of-freedom manipulator of the present invention is composed of a base assembly, an arm assembly and a gripper assembly, the arm assembly is arranged on the base assembly, and the gripper assembly is arranged at the end of the arm assembly;
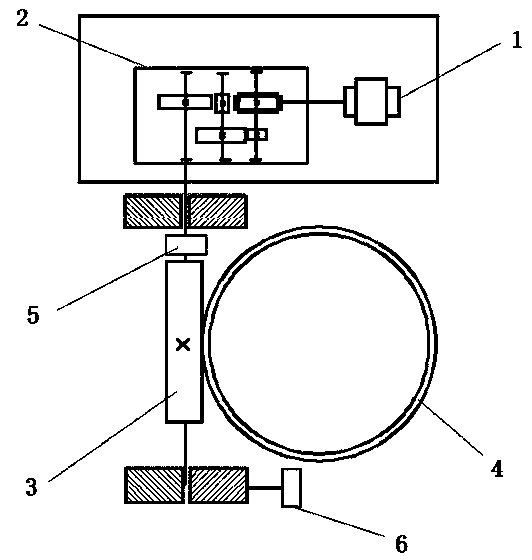
[0022] The base assembly includes a base drive motor 1, a base motor reducer 2, a base worm 3, a base turbine 4, and a base shaft 7. The base turbine 4 is connected to the base 32 through the base shaft 7, and the base drives The motor 1 drives the base motor reducer 2 to drive the base worm 3 and the base turbine 4 to engage and drive, thereby driving the base 32 to rotate; the base assembly also includes a first stroke switch 5, a first limit switch 6, and a first stroke The switch 5 is arranged at one end of the base worm 3 , the first limit switch 6 is arranged at one side of the base turbine 4 , and the rotation angle of the base 32 is determined by the first travel switch 5 and the first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More