

MIMU and GPS combined pedestrian navigation method based on augmented lagrangian condition
A pedestrian navigation and pedestrian technology, which is applied in the field of pedestrian navigation system information fusion, can solve the problems of unsatisfactory processing methods, easy to be affected by objective factors, poor stability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
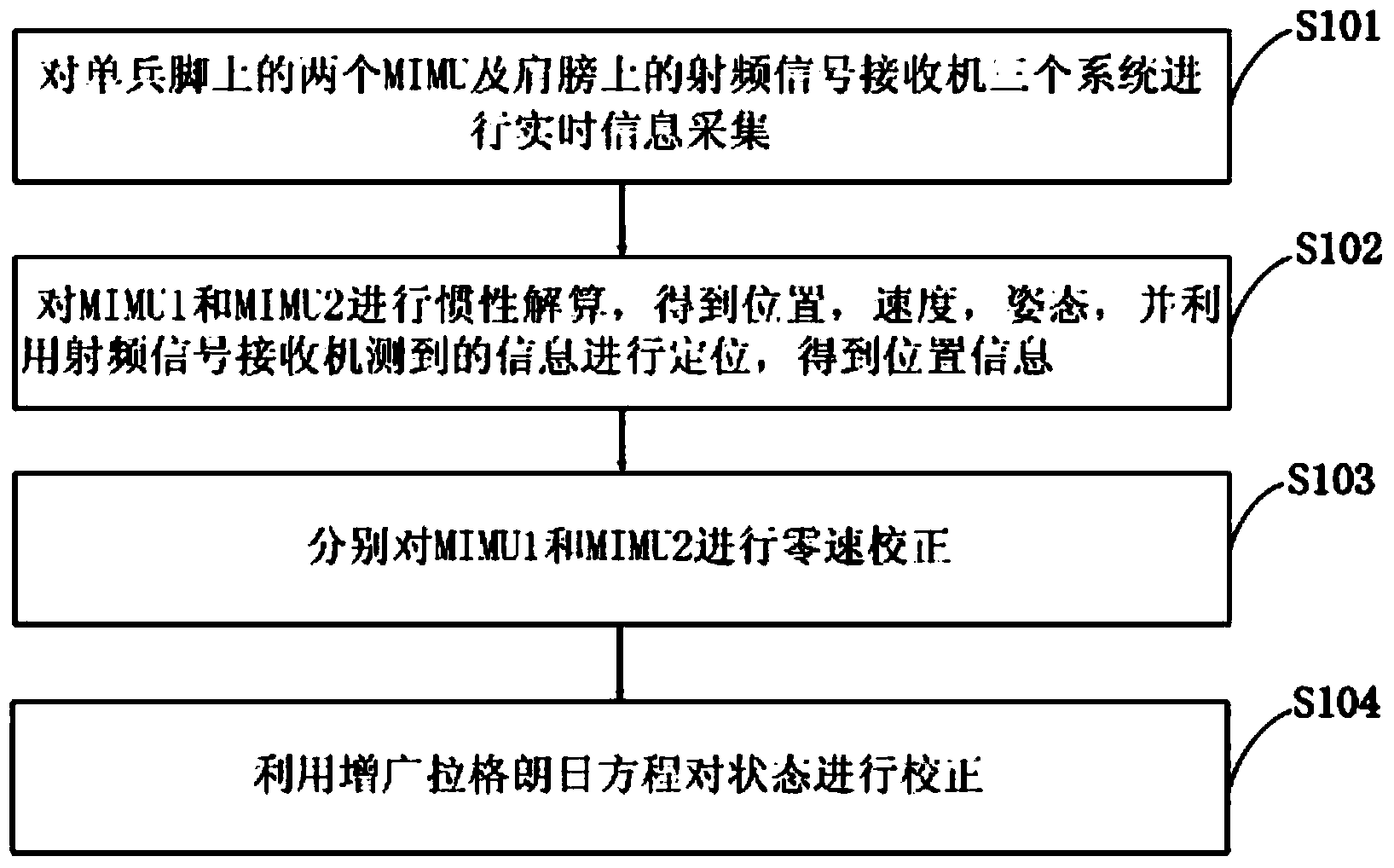
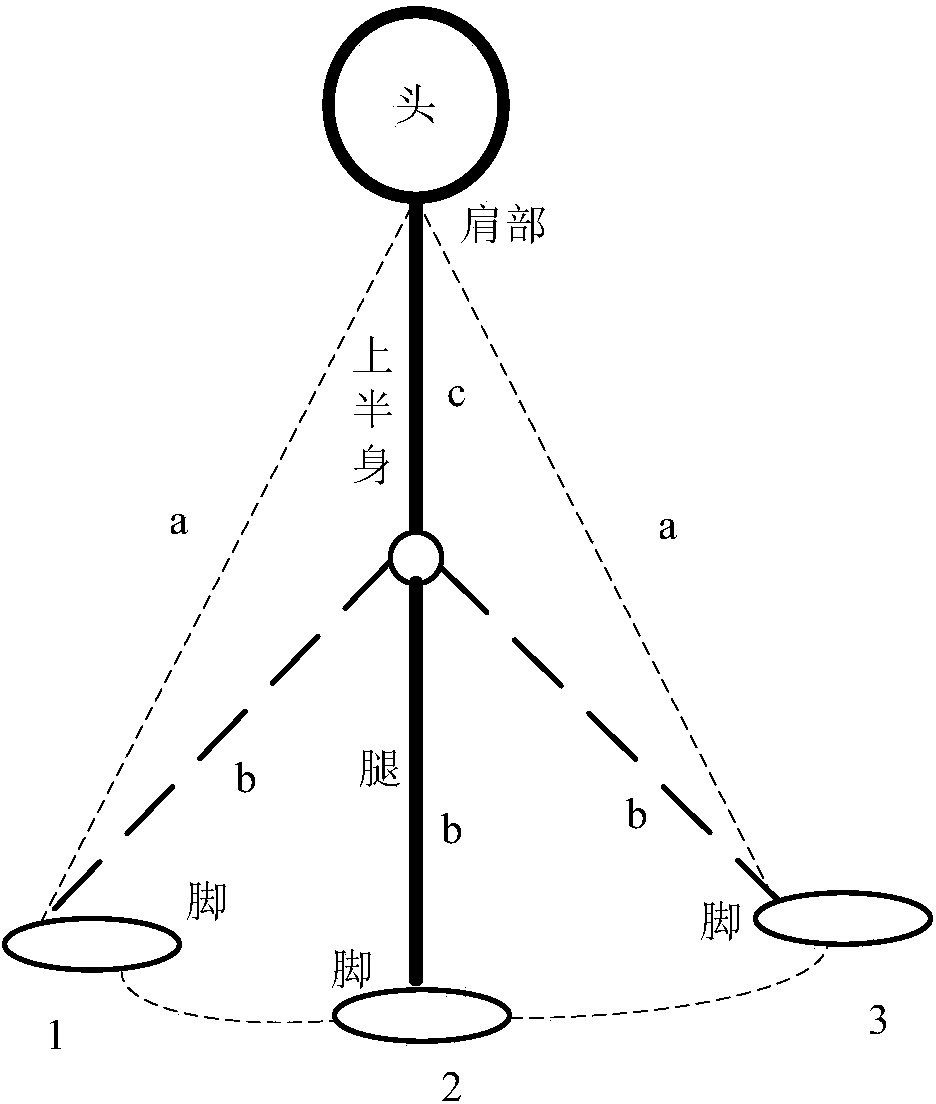
[0047] Step 1: Fix MIMU1 and MIMU2 on the heel and toe of one foot of the pedestrian respectively, fix the RF signal receiver on the shoulder of the pedestrian (on the same side as the foot with the double MIMU fixed), and collect data in real time for information fusion.
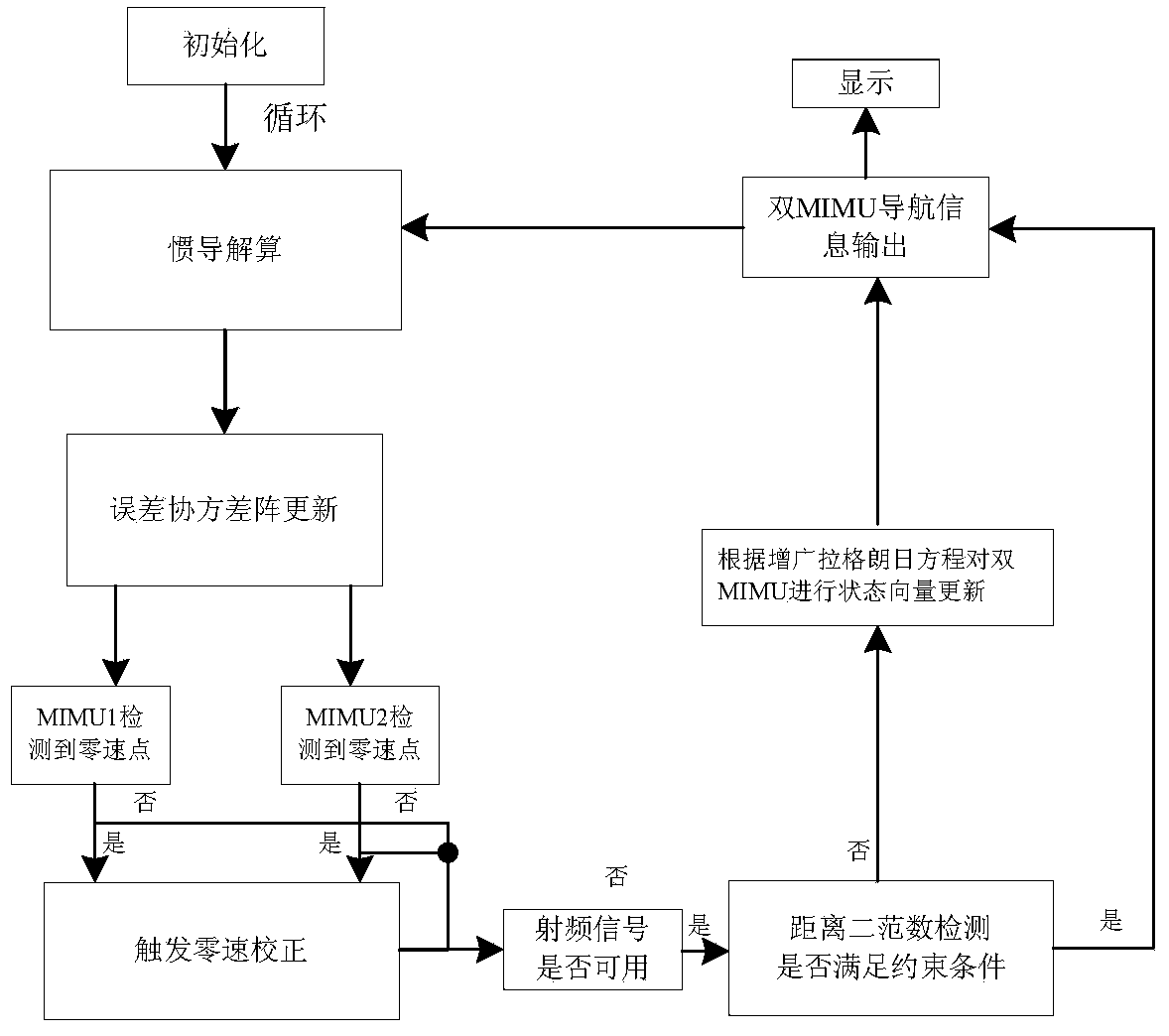
[0048] Step 2: Perform inertial navigation calculation on the data collected by MIMU1 and MIMU2, and obtain the speed, position and attitude of the inertial navigation pedestrian when traveling. At the same time, the radio frequency signal received from the radio frequency signal receiver side is used for positioning to obtain the position of the receiv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More