

Indoor robot vision hand-eye relation calibration method based on 3D image sensor
An image sensor and indoor robot technology, applied in the field of robot vision, can solve problems such as complex calculations, achieve high measurement accuracy, simplify the calibration process, and meet the needs of hand-eye calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
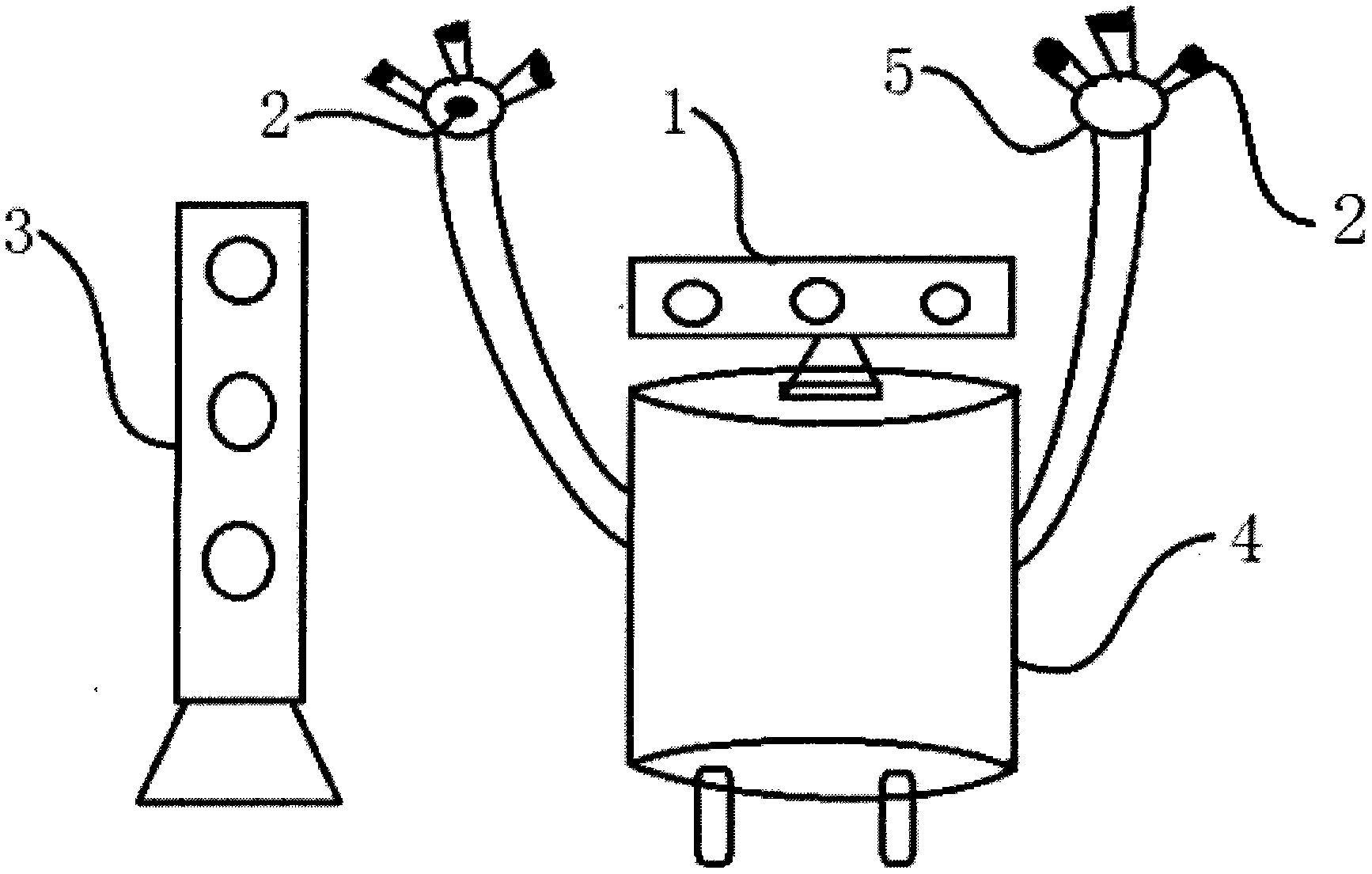
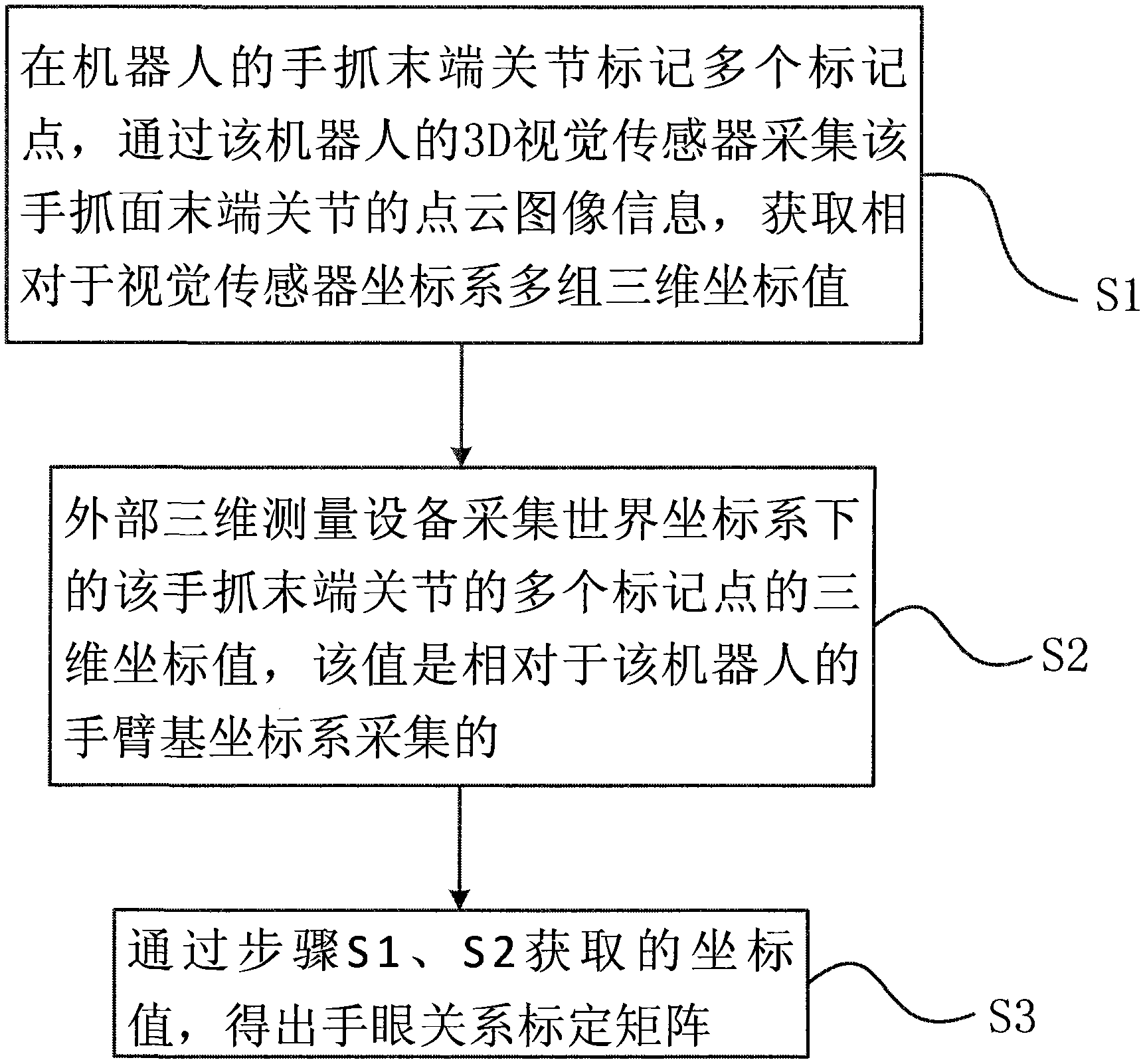
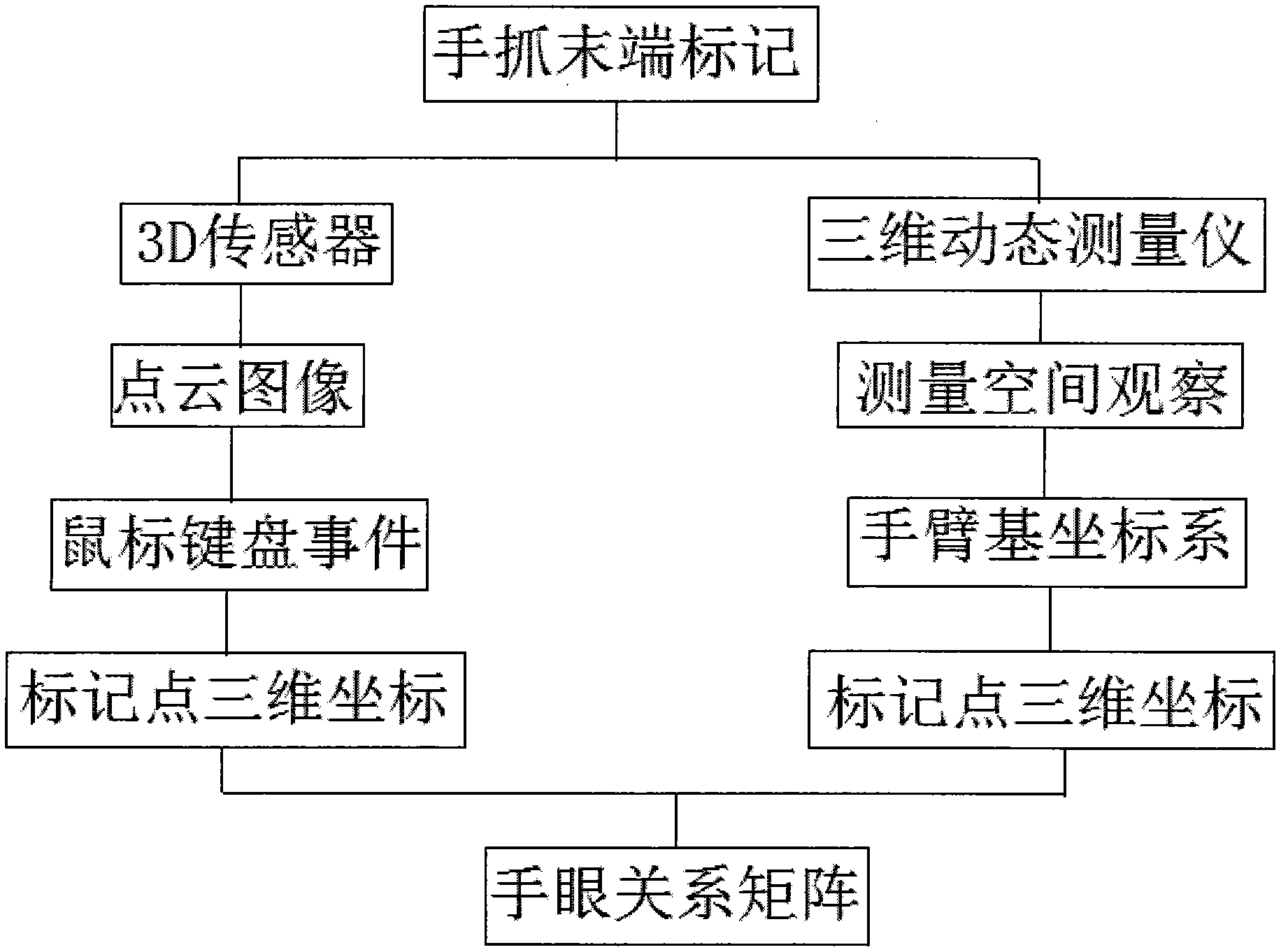
[0015] Please refer to figure 1 , figure 1 It is a schematic diagram of the structure of the robot and the external three-dimensional measuring equipment of the embodiment of the present invention. The indoor mobile robot 4 is provided with a 3D sensor Kinect, and four black dots 2 are marked on the end joint 5 of the robot's hand grasping, as marking points, respectively located at the end of the left and right hand grasping At the end of the three fingers of the joint and in the palm of the hand, an NDI three-dimensional dynamic measuring instrument 3 is erected beside the indoor mobile robot. When measuring, enable the robot to enable the joints of the arm and the end of the hand, so that the end of the hand is in a suitable position in front of the robot, ensure that it is within the field of view of Kinect, and make the four marking points at the end of the finger related to each other as three points Four points that are not collinear are not coplanar. The robot termin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More