

Lower limb rehabilitation training exoskeleton with bionics design
A rehabilitation training and exoskeleton technology, applied in passive exercise equipment, physical therapy, equipment to help people walk, etc., can solve the problems of complex driving structure, slow response speed, discomfort, etc., and achieve compact and lightweight structure and fast response speed. , the effect of reducing damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Further illustrate the present invention below in conjunction with accompanying drawing.
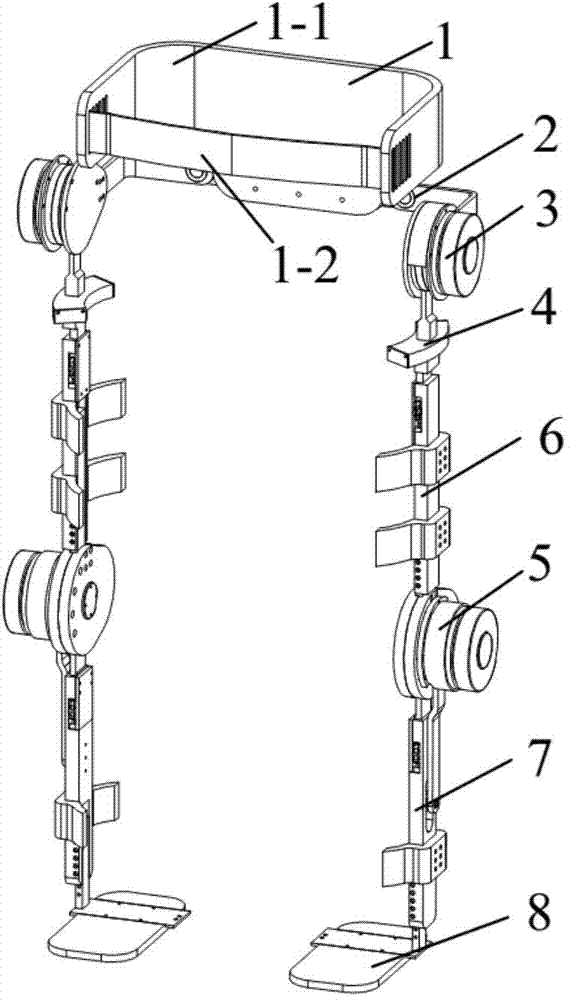
[0022] Such as figure 1 As shown, the bionic design exoskeleton for lower limb rehabilitation training includes: waist tightening mechanism 1, hip joint adduction and abduction mechanism 2, hip joint flexion and extension mechanism 3, hip joint rotation internal rotation and external rotation mechanism 4, knee joint flexion and extension mechanism 5, thigh rod Mechanism 6, calf bar mechanism 7, sole plate 8.
[0023] The waist tightening mechanism 1 includes a U-shaped board 1-1 and a waist strap 1-2; the waist strap 1-2 is arranged at the opening of the U-shaped board 1-1, and the U-shaped board 1-1 and the waist of the human body are tied tightly. fit.
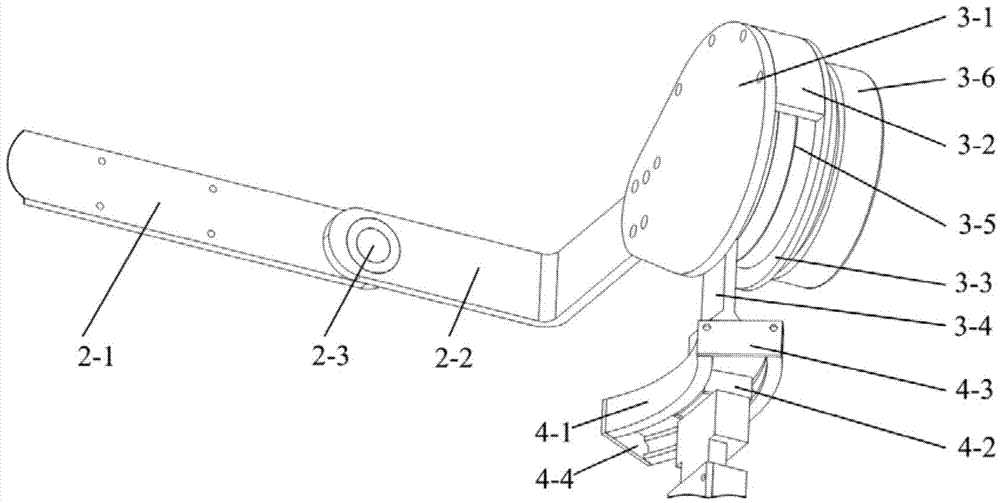
[0024] Such as figure 2 As shown, the hip joint adduction and abduction mechanism 2 includes the left and right leg connecting plates 2-1, the hip joint abduction arm 2-2 and the hip joint abduction bearing 2-3; the hip join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More