

Electronic device and navigation method thereof
An electronic device and navigation method technology, applied in the field of navigation, can solve the problems of electronic devices that cannot be located, the signal is not good, or even shielded signal, and cannot be located, so as to improve the inconvenience, reduce the error, and improve the navigation experience.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] This embodiment discloses a navigation method for an electronic device in the case of a single road by using a three-axis gyroscope to collect acceleration information:
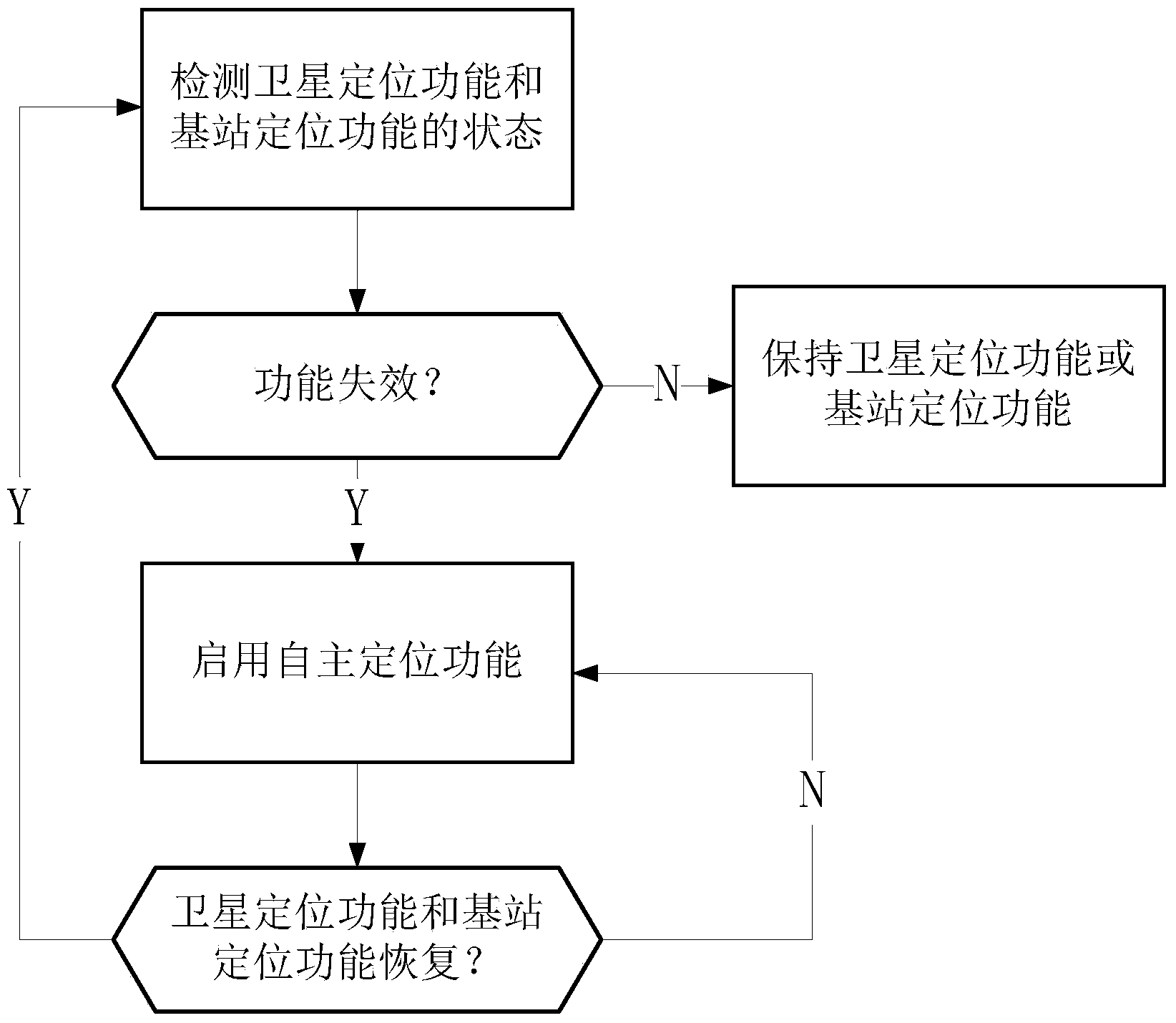
[0050] figure 2 It is the flow chart of step S2 of this embodiment, combined with figure 1 It can be seen that the step S2 includes the process:
[0051] S2-1: Read the acceleration information of the three-axis gyroscope, and judge whether the acceleration information of the electronic device changes. If the acceleration information remains unchanged, go to step S2-2; if the acceleration information changes, go to step S2-3;
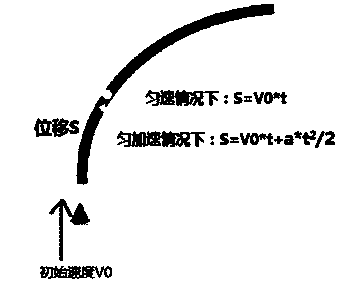
[0052] S2-2: Calculate the displacement according to the initial speed information, acceleration information and preset time interval, and update the current positioning information on the electronic map; return to step S2-1;
[0053] S2-3: Calculate the displacement according to the initial speed information, acceleration information and the time before the acceleration chan...
Embodiment 2
[0062] This embodiment discloses a navigation method for electronic equipment in the case of multiple roads by using a three-axis gyroscope to collect acceleration information; using a compass to collect the movement direction:
[0063] Figure 4 It is a flow chart of step S2 in this embodiment, and the step S2 includes the process:
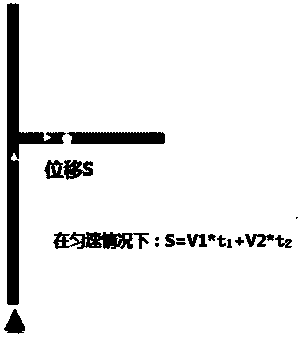
[0064] S2-1: Read the movement direction information of the compass, record the movement direction when it fails as the initial movement direction, record the road where the failure occurs as the initial road, read the acceleration information of the three-axis gyroscope, and judge the electronic equipment Whether the direction of motion of the device changes, if the direction of motion remains unchanged, go to step S2-2; if the direction of motion changes, go to step S2-3;
[0065] S2-2: Calculate the displacement according to the initial speed information, acceleration information and the preset time interval, and update the current positionin...
Embodiment 3
[0075] The invention also discloses an electronic device. Such as Figure 6 As shown, the electronic equipment includes a processing module (CPU) 10, a GPS navigation module 1 coupled with the processing module (CPU) 10, a mobile communication module 2, an autonomous positioning module 3 and a storage unit; the mobile communication module 3 is used for base station positioning; Wherein the autonomous positioning module 3 includes a gravity sensing unit 31 for sampling acceleration information and a pointing unit 32 for sampling motion direction information;
[0076] When the function failure of GPS navigation module 1, mobile communication module 2, processing module (CPU) 10 records the location information when failure as initial location information to storage unit; Autonomous positioning module 3 calculates displacement based on initial location information; Processing module 10 Update the current positioning information to the electronic map according to the displacement...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More