

Lever arm error calculation method based on nonlinear tracking differentiator
A tracking differentiator, non-linear technology, applied in the fields of inertial navigation systems and satellite navigation systems, can solve the problems of measurement accuracy influence, data effect is not obvious, system position, speed and acceleration errors and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
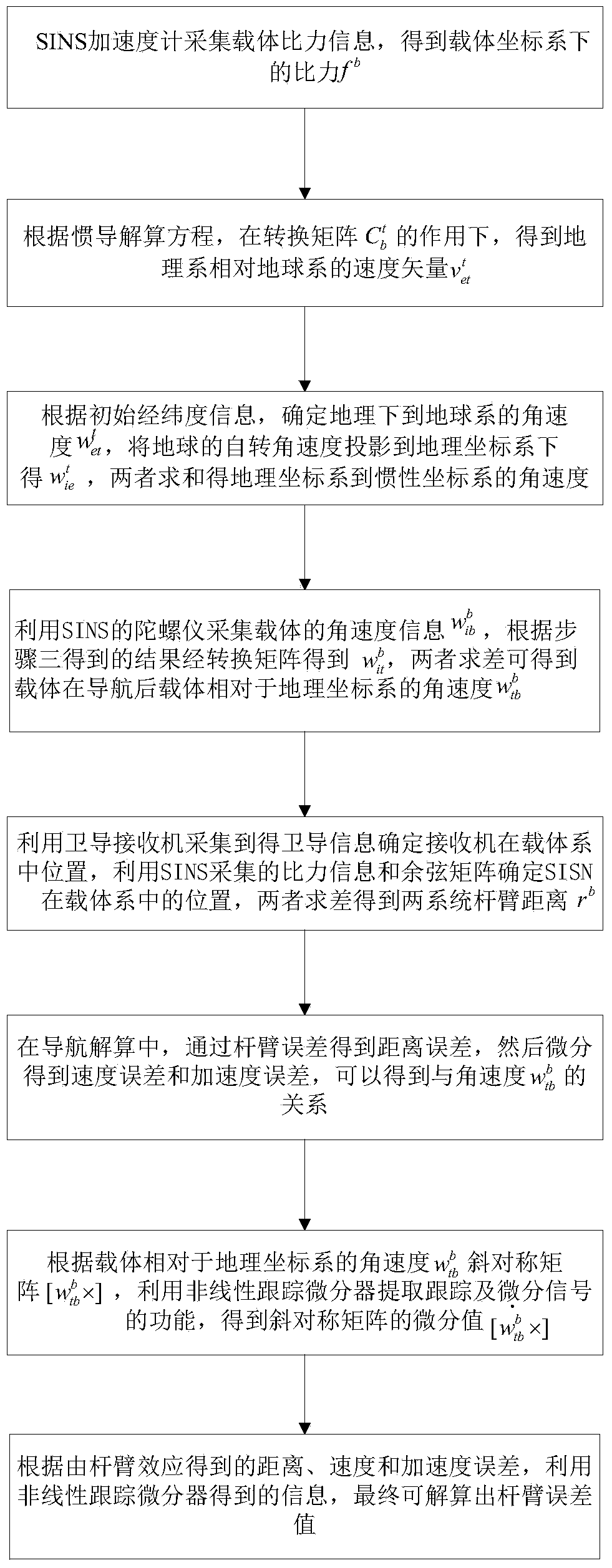
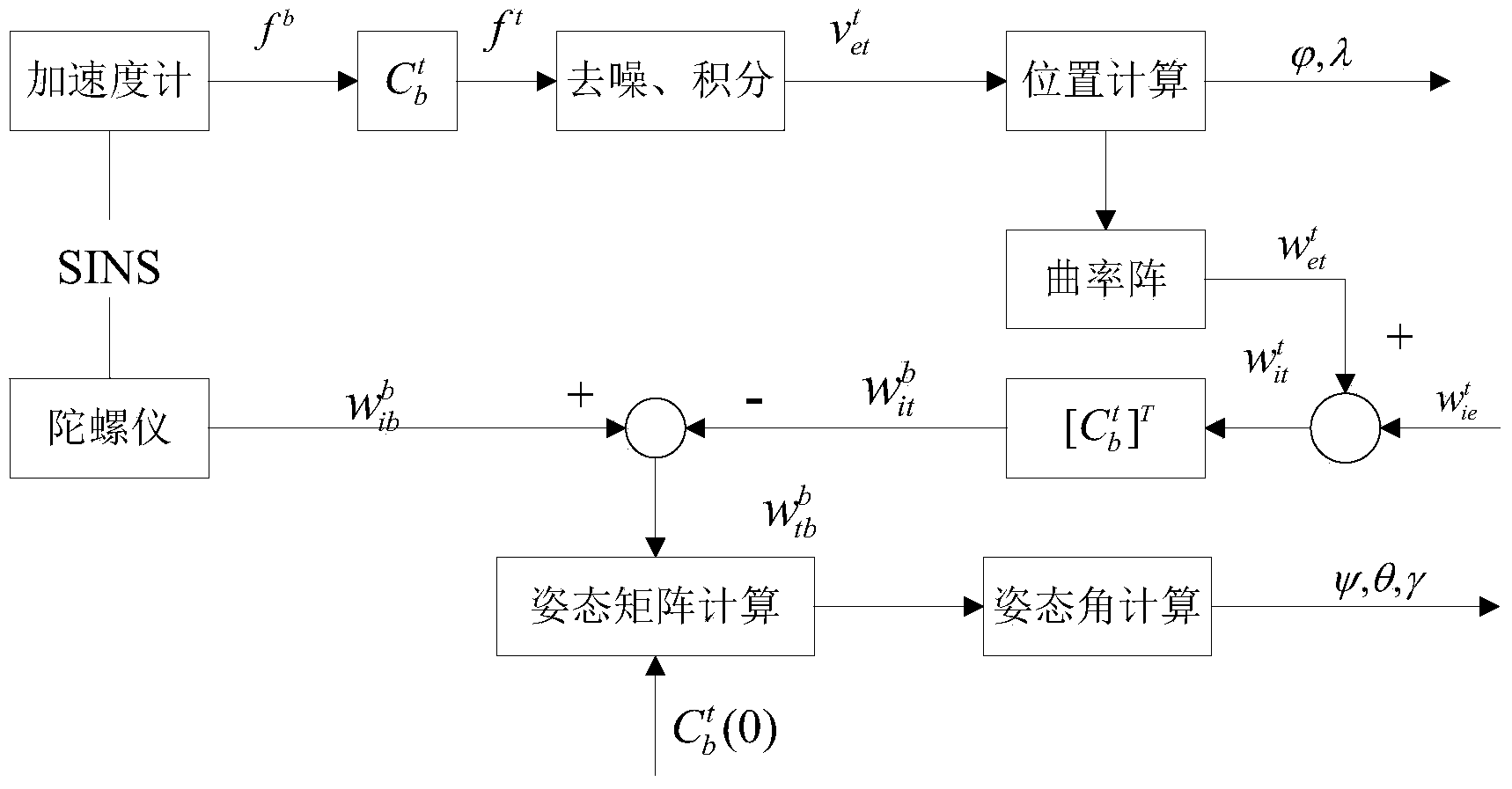
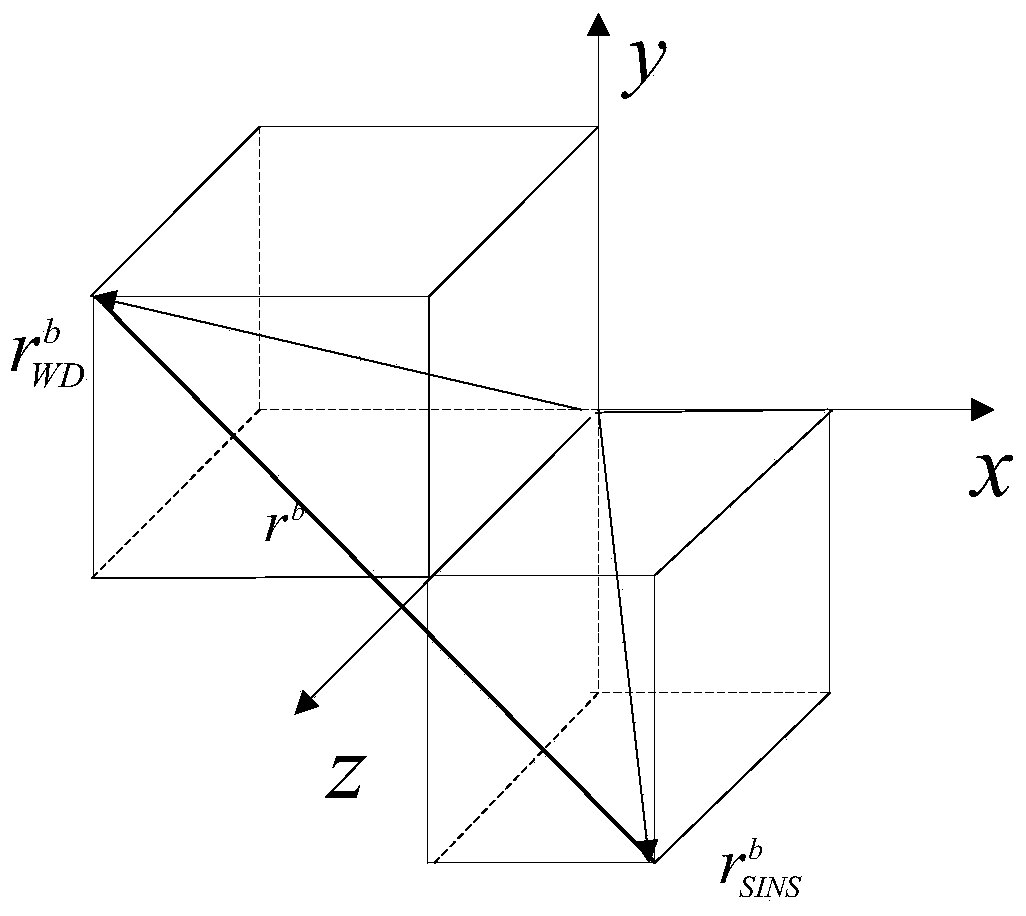
[0041] The invention utilizes the SINS accelerometer and the gyroscope to measure the specific force information of the carrier and the angular velocity information of the carrier respectively, and obtains the projected angular velocity of the carrier system relative to the geographic system in the carrier system from the navigation solution equation Calculate the position of its receiver in the carrier system according to the satellite navigation system (GPS or Beidou) Using the SINS system to calculate its position in the carrier system Differentiate the position difference between the receiver and SINS in the carrier system to obtain the velocity and acceleration expressions, and calculate the rotation vector to update the quaternion Q by collecting the angular rate signal from the gyroscope. update; at the same time by the tracking differenti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More