

Multifunctional leg-wheel-combined mobile robot
A mobile robot and multi-functional technology, applied in the field of mobile robots, can solve problems such as complex leg structure design, poor dynamic stability, and complex wheel-leg switching, so as to improve motion efficiency and stability, high wheel efficiency, and improve motion The effect of stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
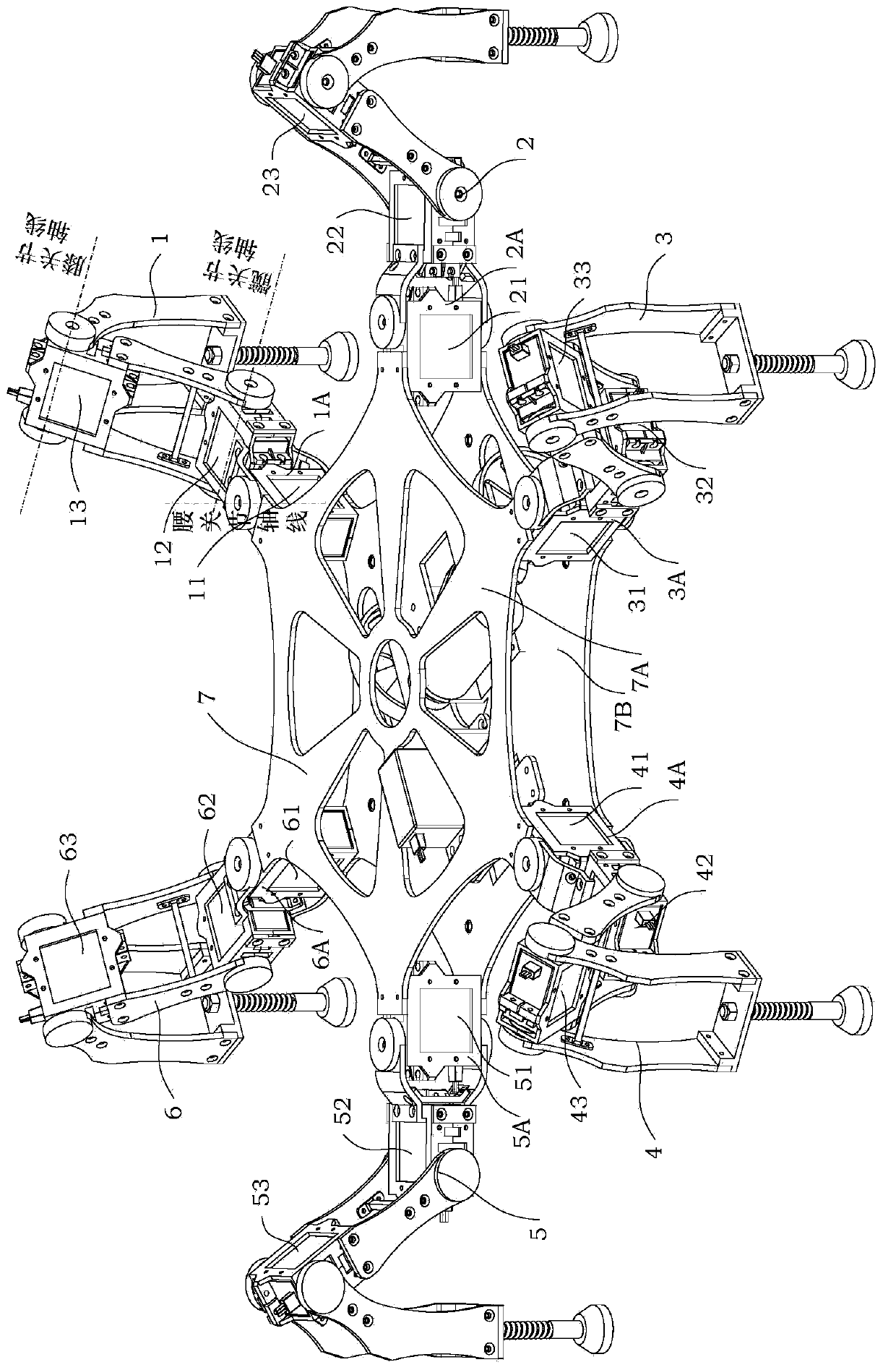
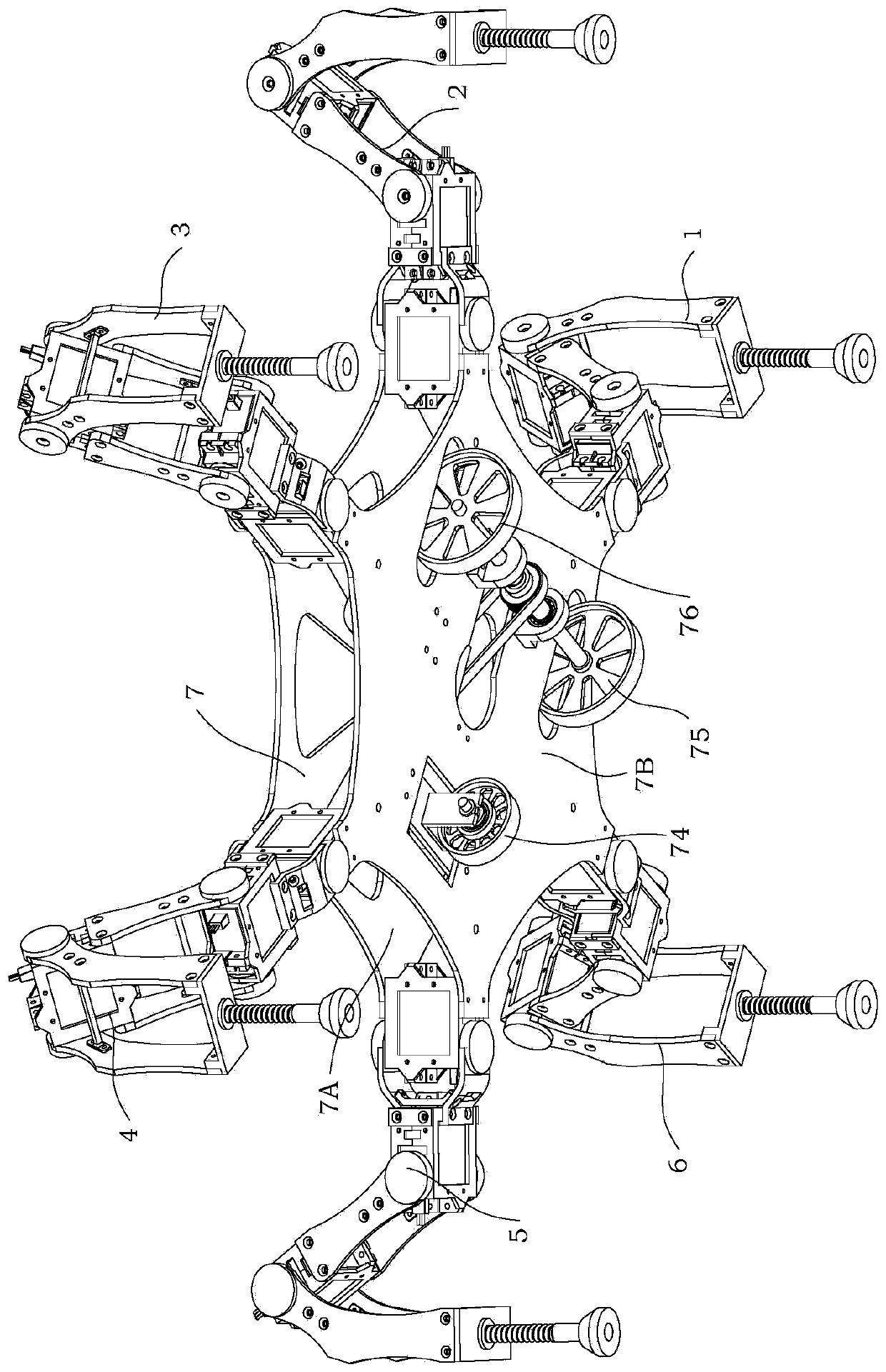
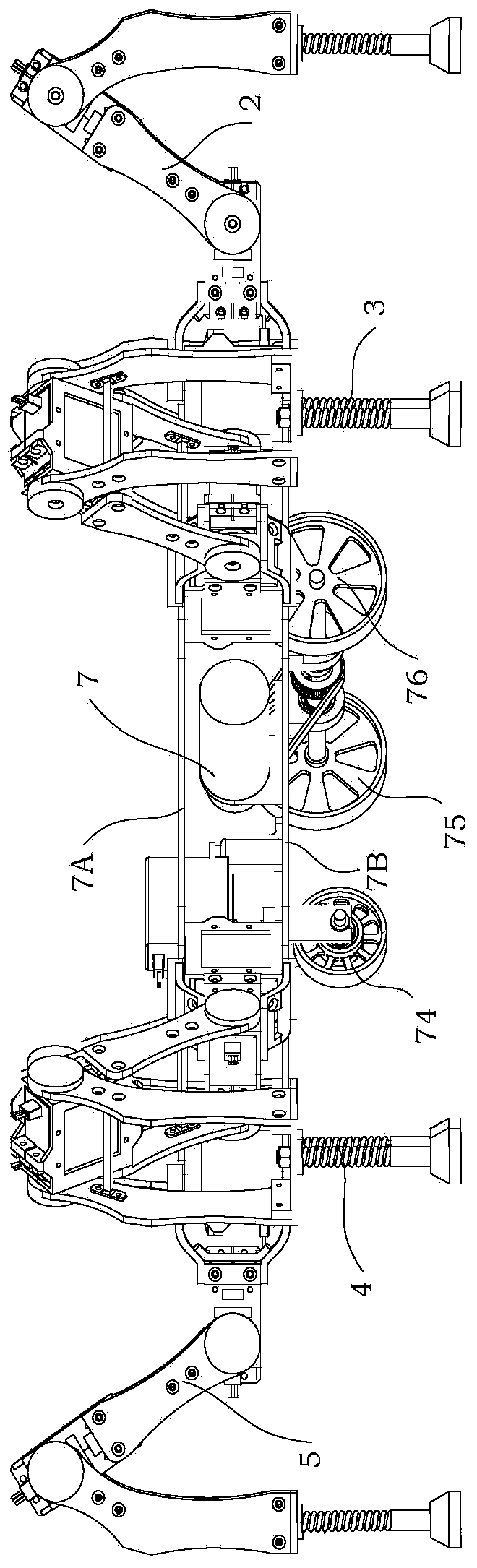
[0034] see figure 1 , Figure 1A , Figure 1B , Figure 1C , Figure 1D Shown, a kind of multifunctional leg-wheel composite mobile robot of the present invention, this leg-wheel composite mobile robot includes six leg assemblies and a torso assembly 7 with the same structure; Said six leg assemblies refer to the first leg assembly 1, A second leg assembly 2 , a third leg assembly 3 , a fourth leg assembly 4 , a fifth leg assembly 5 and a sixth leg assembly 6 . Each leg has three conventional joints, namely the waist joint, hip joint and knee joint, and the parts on the leg are as follows figure 1 , Figure 3A The axis of the waist joint, the axis of the hip joint and the axis of the knee joint shown are also the axis of the steering gear of the three steering gears.
[0035] Torso Component 7
[0036] see figure 1 , Figure 1A , F...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More