

Magnet flux amount estimation device, abnormal demagnetize determination device, synchronous motor driving device, and electric motor car
A permanent magnet synchronous motor and magnetic flux technology, which is used in the control of electromechanical transmissions, electric vehicles, winding excitation motors, etc., which can solve the problems of time-consuming, inability to detect or estimate the magnetic flux
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 approach )
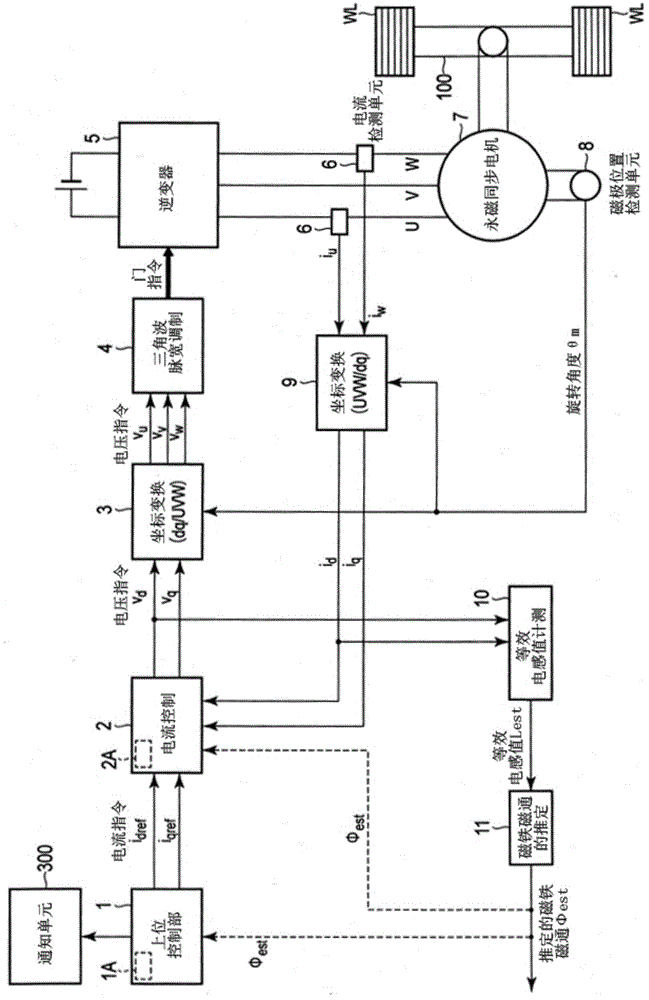
[0037] figure 1 It is a block diagram showing a configuration example of the magnet magnetic flux estimating unit, the synchronous motor drive device, and the electric vehicle according to the first embodiment. In addition, although several embodiment is described below, the same code|symbol is attached|subjected to the structure similar to this embodiment, and description is abbreviate|omitted.
[0038] figure 1 The electric vehicle shown is equipped with a host control unit 1, a current control unit 2, a coordinate conversion unit 3, a triangular wave pulse width modulation unit 4, an inverter 5, a current detection unit 6, a motor 7, a magnetic pole position detection unit 8, and a coordinate conversion unit 9 , an equivalent inductance value measuring unit 10 , a magnet flux estimating unit 11 , a wheel WL, and an axle 100 that transmits rotational power of the AC motor M to the wheel WL.
[0039] The current control unit 2, the coordinate conversion unit 3, and the tria...
no. 2 approach )
[0108] Figure 8 An example configuration of the magnet magnetic flux estimating device, the synchronous motor drive device, and the electric vehicle according to the second embodiment is shown.
[0109] Figure 8 in figure 1 The high-frequency voltage application unit 12, the adder 13 and the high-frequency current amplitude detection unit 14 are newly added on the basis of the above.
[0110] Figure 9 It is an example showing high-frequency voltage and corresponding high-frequency current waveform.
[0111] The high-frequency voltage applying unit 12 outputs, for example, Figure 9 The high-frequency voltage vdhf shown in (a), the high-frequency voltage vdhf is added to the output of the current control unit 2, that is, the d-axis voltage command Vd1 in the adder 13 to calculate a new d-axis voltage command Vd2, and input it to coordinate transformation unit 3.
[0112] The high-frequency current amplitude detection unit 14 measures the amplitude Δihf of the high-freq...
no. 3 approach )
[0122] Figure 10 An example configuration of the magnet magnetic flux estimating device, the synchronous motor drive device, and the electric vehicle according to the third embodiment is shown.
[0123] Figure 10 in figure 1 A d-axis bias current command value generation unit (bias current unit) 15 is added on the basis of the d-axis for passing a bias current to the d-axis. The d-axis bias current command value generation unit 15 generates a d-axis current command value that varies from an initial value at a predetermined rate of increase. Also, the d-axis bias current command value generation unit 15 can be used as figure 1 The high-level control unit 1 is composed of independent elements, and may be an element included in the high-level control unit 1 .
[0124] The magnet magnetic flux estimation unit 11 calculates an estimated value of the magnet magnetic flux based on at least one of the equivalent inductance value Lest and the d-axis bias current command value idr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More