

Judgment method of target moving-stationary state based on passive multilateration technology
A multi-point positioning and static state technology, applied in the field of target monitoring, can solve problems such as irregular time intervals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
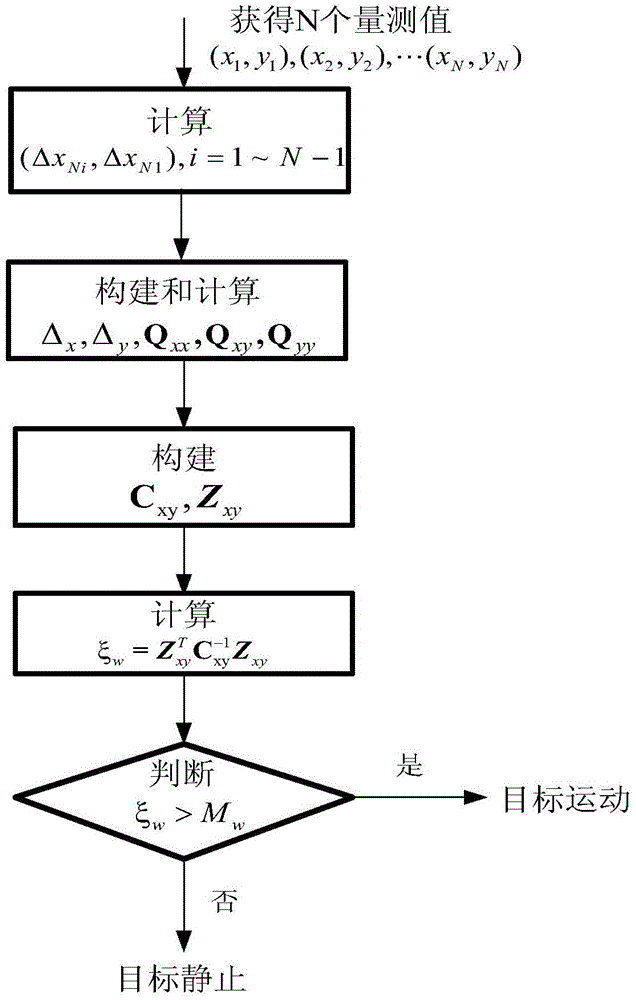
[0052] Such as figure 1 Shown, a kind of target motion-static state judging method based on passive multilateration technology is characterized in that comprising the following steps:
[0053] The first step is to obtain the measurement values of N targets from the airport scene monitoring multilateration system as a window processing sample: {x 1 ,y 1},{x 2 ,y 2},...{x N ,y N}, respectively calculate the geometric precision factor matrix of these N measured values, namely in E(x i the y i ), E(x i the y i ), represents the mathematical expectation;
[0054] The second step is to subtract the remaining N-1 measured values from the Nth measured value to obtain Δx Ni =x N -x i , i=1~N-1, Δy Ni =y N -y i ,i=1~N-1;
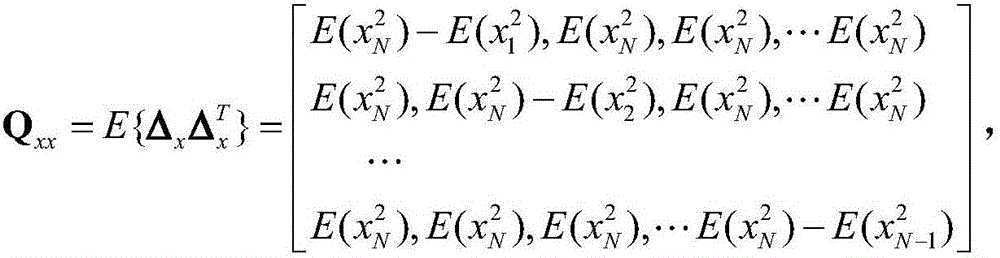
[0055] The third step, build The correlation matrix of
[0056] Q x x = E { Δ x Δ ...
Embodiment 2
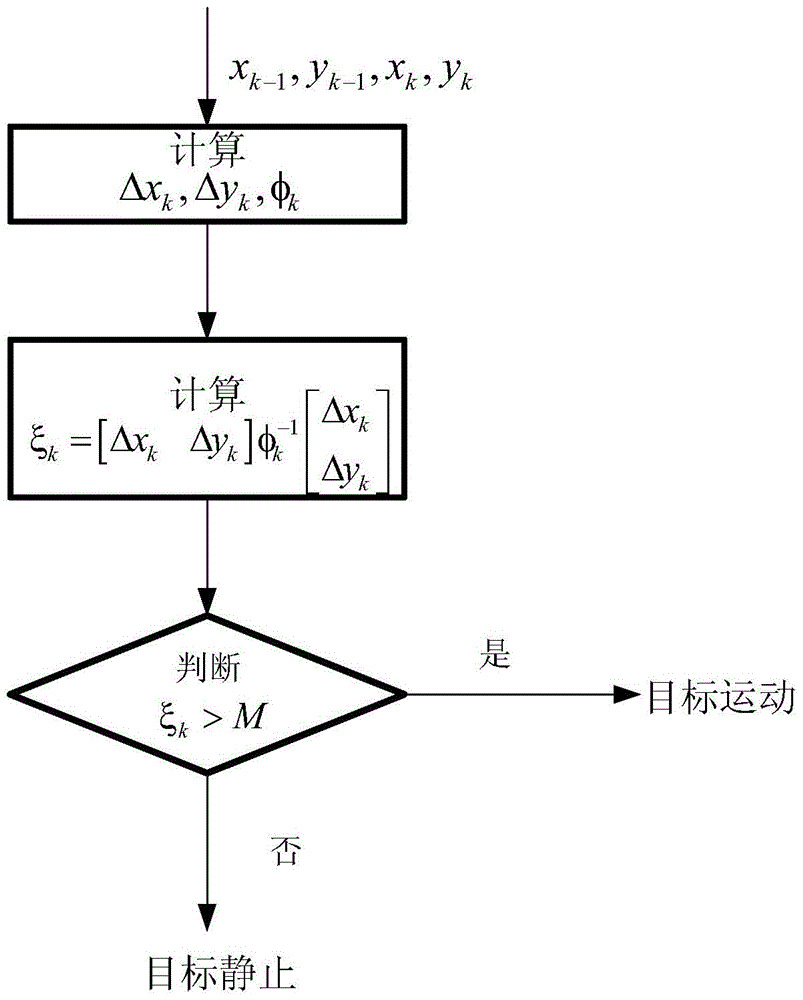
[0067] Such as figure 2 Shown, a kind of target motion-static state judging method based on passive multilateration technology is characterized in that comprising the following steps:
[0068] The first step is to obtain the measurement value x from the airport surface monitoring multilateration system k 、y k ;
[0069] The second step is to calculate the geometric precision factor matrix, namely in E(x k the y k ), represents the mathematical expectation;
[0070] The third step, calculation If the target is at rest, then ξ k subject to χ with 2 degrees of freedom 2 distribution; if the target is in motion, that is, Δx k or Δy k is no longer a zero-mean Gaussian random variable, ξ k will be significantly larger;
[0071] The fourth step is to set the significance level α, then the threshold M of a single measured value can be determined, and then use ξ k Make the following judgments: a. When ξ k > M, the target is judged as moving; b, when ξ k ≤M, it is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More