Mobile robot automatic positioning algorithm based on wireless sensor network
A mobile robot and wireless sensor technology, which is applied in the direction of location information-based services, positioning, wireless communication, etc., can solve the problems of limited positioning accuracy, external environmental influence, lack of autonomy, etc., to reduce the impact of errors and improve positioning accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The preferred embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
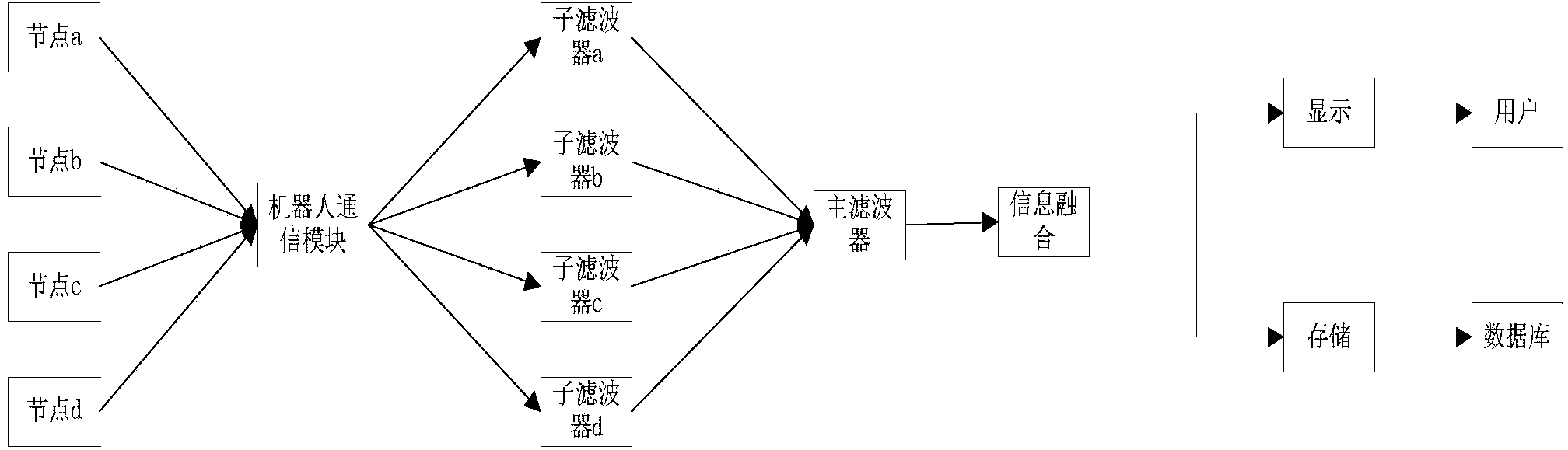
[0024] In the invention, a fusion-feedback federated Kalman filter is used to send the local optimal estimation of each local filter into the global filter for information fusion to obtain the global optimal fusion and improve the positioning accuracy; through the global filter According to the distribution criterion and the local filter, the information distribution is carried out and the data of the local filter is weighted by using the information distribution factor, which effectively reduces the error influence of the local Kalman filter, and without changing the measurement noise covariance matrix, By changing the allocation factor, the purpose of indirectly changing the estimation error of each subsystem is achieved, so as to achieve the global optimal filtering and greatly improve the positioning accuracy.
[0025] figure 1 It is a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More