CAN message arbitration influence factor detection system and method thereof
A technology of influencing factors and detection systems, applied in transmission systems, digital transmission systems, data exchange through path configuration, etc., can solve the problems of CAN message arbitration failure, no message arbitration, etc., and achieve the effect of ensuring effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
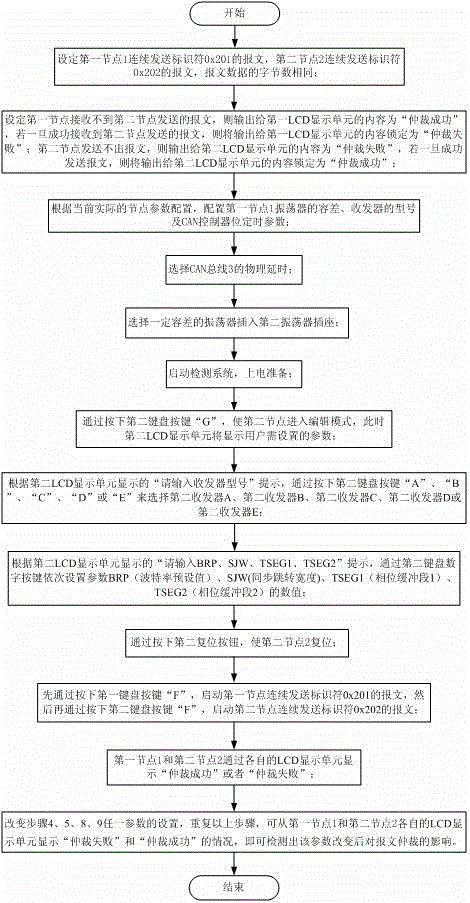
[0014] like image 3As shown, the CAN message arbitration influencing factor detection system detects the impact of the change of the sampling point position on the CAN message arbitration caused by the change of the CAN controller bit timing parameter of the second node 2, and proceeds in turn according to the following steps: 1) Set the first node 1 continuously sends messages with the identifier 0x201, and the second node 2 continuously sends messages with the identifier 0x202, and the number of bytes of message data is the same. The purpose of this setting is to make the priority of the first node 1 to send messages higher than that of the second node 2) The priority of the message sent by node 2; 2) If the first node can not receive the message sent by the second node, the content output to the first LCD display unit is "arbitration successful", if the second node is successfully received For the message sent by the second node, the content output to the first LCD display...
Embodiment 2
[0016] like image 3 As shown, the CAN message arbitration influencing factor detection system detects the impact of the oscillator tolerance change of the second node 2 on the CAN message arbitration, and proceeds in sequence as follows: 1) Set the first node 1 to continuously send the identifier 0x201 message, the second node 2 continuously sends messages with the identifier 0x202, and the number of bytes of the message data is the same. The purpose of this setting is to make the priority of the message sent by the first node 1 higher than that of the message sent by the second node 2. Priority; 2) If the first node cannot receive the message sent by the second node, the content output to the first LCD display unit is "arbitration successful", if the message sent by the second node is successfully received, Then the content output to the first LCD display unit is locked as "arbitration failure"; if the second node cannot send a message, the content output to the second LCD d...
Embodiment 3
[0018] like image 3As shown, the CAN message arbitration influencing factor detection system detects the impact of transceiver delay changes on CAN message arbitration, and proceeds in turn as follows: 1) Set the first node 1 to continuously send messages with the identifier 0x201, and the second Node 2 sends messages with the identifier 0x202 continuously, and the number of bytes of the message data is the same. The purpose of this setting is to make the priority of the message sent by the first node 1 be higher than that of the second node 2; 2) It is set that the first node cannot receive the message sent by the second node, then the content output to the first LCD display unit is "arbitration successful", and once the message sent by the second node is successfully received, it will be output to the first LCD display unit The content of the first LCD display unit is locked as "arbitration failure"; if the second node fails to send a message, the content output to the seco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More