

SRP-PHAT multi-source spatial positioning method
A positioning method and source space technology, applied in positioning, measuring devices, instruments, etc., can solve problems such as low spatial resolution, unsatisfactory multi-sound sources, and susceptibility to reverberation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0179] Example 1 Localization of two sound sources
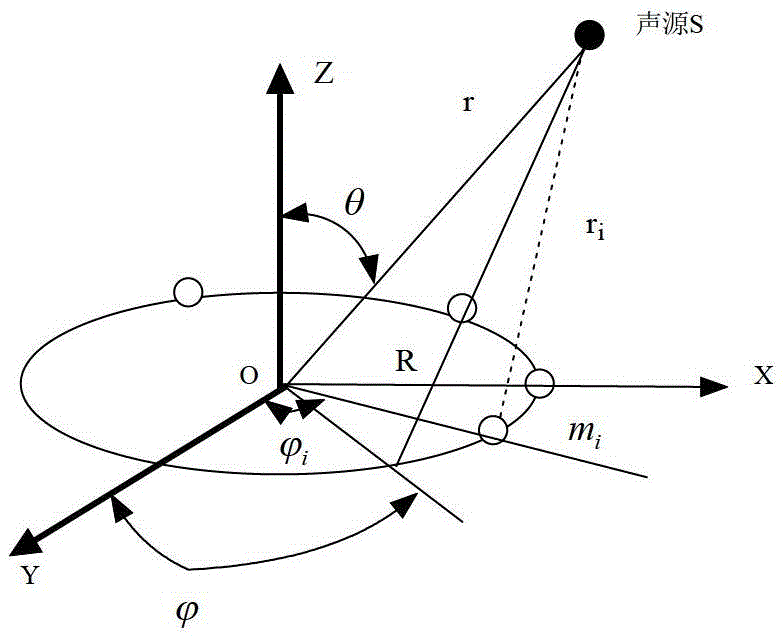
[0180] 1. Uniform circular array positioning model selection
[0181] The simulation experiment was simulated in different SNR and reverberation environments. The uniform circular array was placed in a room of 7m×8m×3.5m, and the spatial positions of the 8-element microphones were [-3.25, -1.6, 1.5], respectively. [-3.25, 1.1, 1.5], [-1.87, 3.75, 1.5], [1.0, 3.75, 1.5], [3.25, 1.8, 1.5], [3.25, -1.0, 1.5], [2.2, -3.75, 1.5] ], [-0.6, -3.75, 1.5].
[0182] 2. Selection of sound source
[0183] The sound source is a randomly generated speech signal, and the signal-to-noise ratio is 0-30dB. The random interference signal is a Gaussian signal, which is used to simulate the noise from the air-conditioning electric fan and the window. The noise power can be up to 10dB, and the corresponding reverberation time is determined by the reflection coefficient of the room wall, floor and ceiling.
[0184] 3. Perform short-time Fourier...
Embodiment 2 3
[0205] Example 2 Localization of three sound sources
[0206] When the number of sound sources is increased to 3, in the case of low signal-to-noise ratio, the problem of false spectral peaks cannot be solved well. Under the condition of high signal-to-noise ratio, it can basically solve the problem of false spectral peaks, and has better resolution ability for multiple sound sources.
[0207] The specific implementation steps are the same as those in Example 1, which are omitted here.
[0208] Figure 15 Shown is a two-dimensional image of three-source localization with a signal-to-noise ratio of 30dB.
[0209] Figure 16 , Figure 17 Shown are the sound source azimuth angles measured by the method proposed in this paper and the traditional SRP-PHAT method under the condition of high signal-to-noise ratio. The SRP-PHAT method based on approximate W-separated orthogonality can effectively solve the problem of false spectral peaks, and can distinguish three signal sources,...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Snr | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More