

Cleaning and flaw detection robot for electric power metal parts
A technology of electric metals and robots, applied in the field of robots, can solve the problems of limited robot degrees of freedom, single function of robots, non-destructive flaw detection, etc., and achieve the effects of easy wiring and installation, strong climbing ability, and strong flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
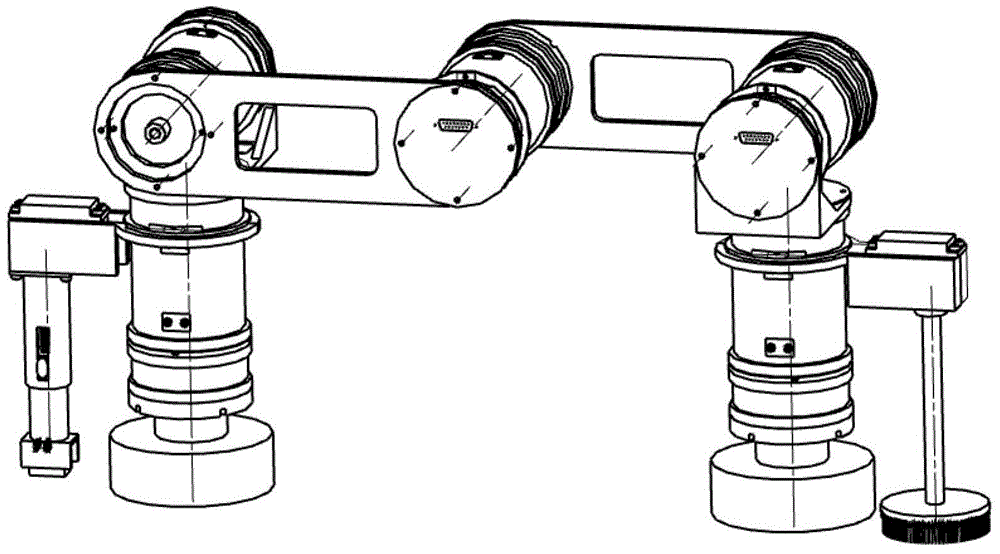
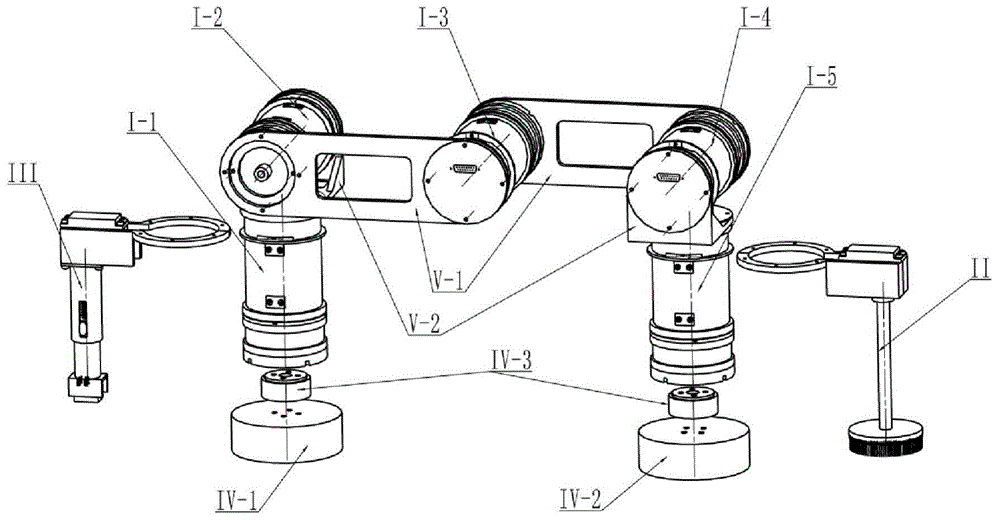
[0040] Such as figure 1 , 2 As shown, it is a cleaning and flaw detection robot for electric metal parts of the present invention, including a robot body, a cleaning device II, a flaw detection device III and a control system. The robot body includes at least three cylindrical longitudinal rotary joints arranged in parallel and arranged longitudinally, Two cylindrical walking rotary joints I-1, I-5 perpendicular to the longitudinal rotary joints, a pair of electromagnetic suckers VI-1, VI-2 and at least four connecting plates, through which the vertical rotary joints pass At least two connecting plates are fixedly connected to form a rotatable connection. The upper end of the walking revolving joint is fixedly connected to the longitudinal revolving joints located on both sides through the other two connecting plates to form a rotatable connection so that each revolving joint is connected in series. The walking revolving joint I- 1. I-5 can rotate along the vertical plane, el...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More