

Spatial three-degree-of-freedom suspension platform controlled through parallel flexible cables
A suspended platform, degree of freedom technology, applied in ship parts, ships, transportation and packaging, etc., can solve the problems of complex control algorithm, slow equipment response, and heavy equipment installation and debugging workload.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described below in conjunction with the accompanying drawings.
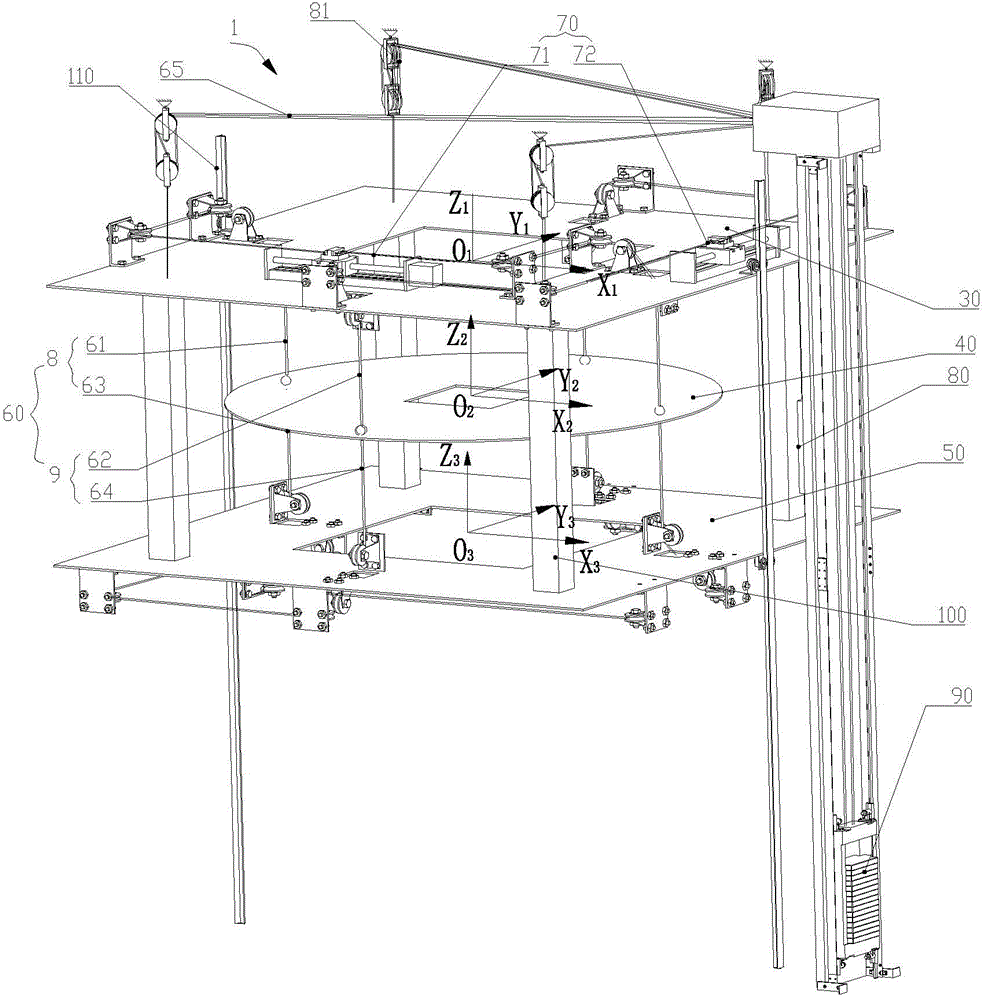
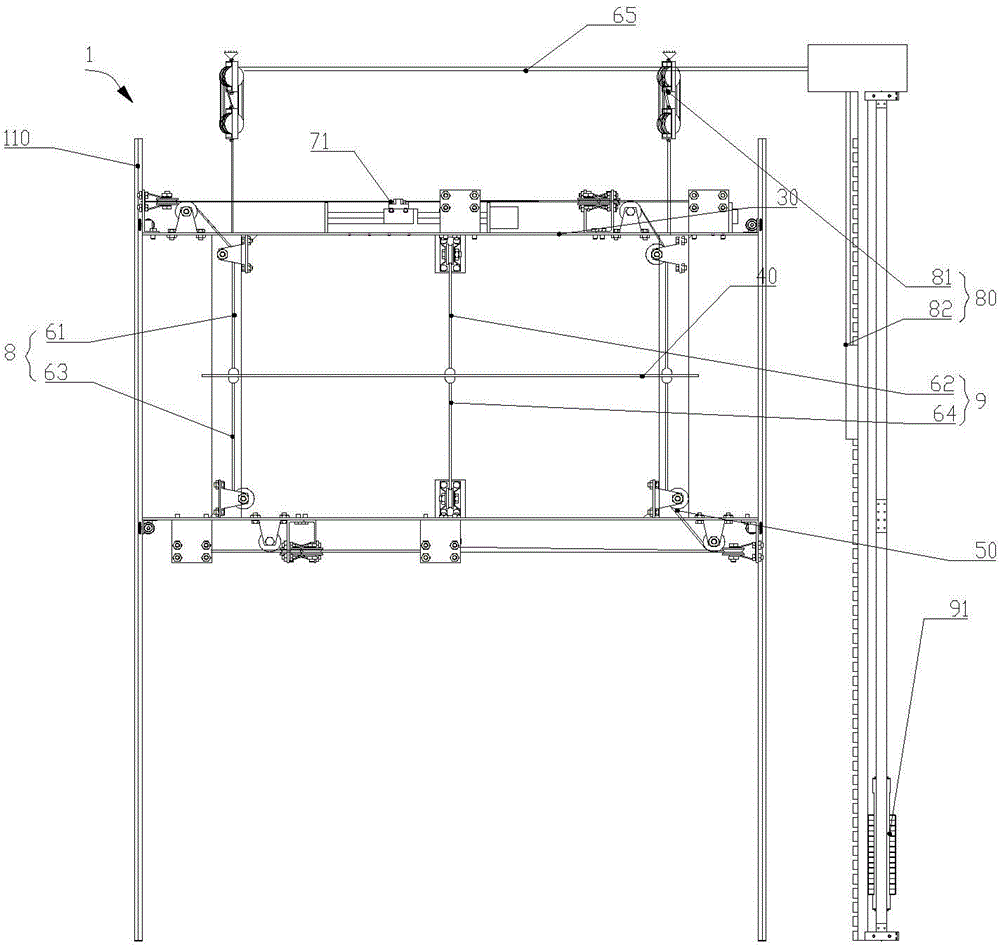
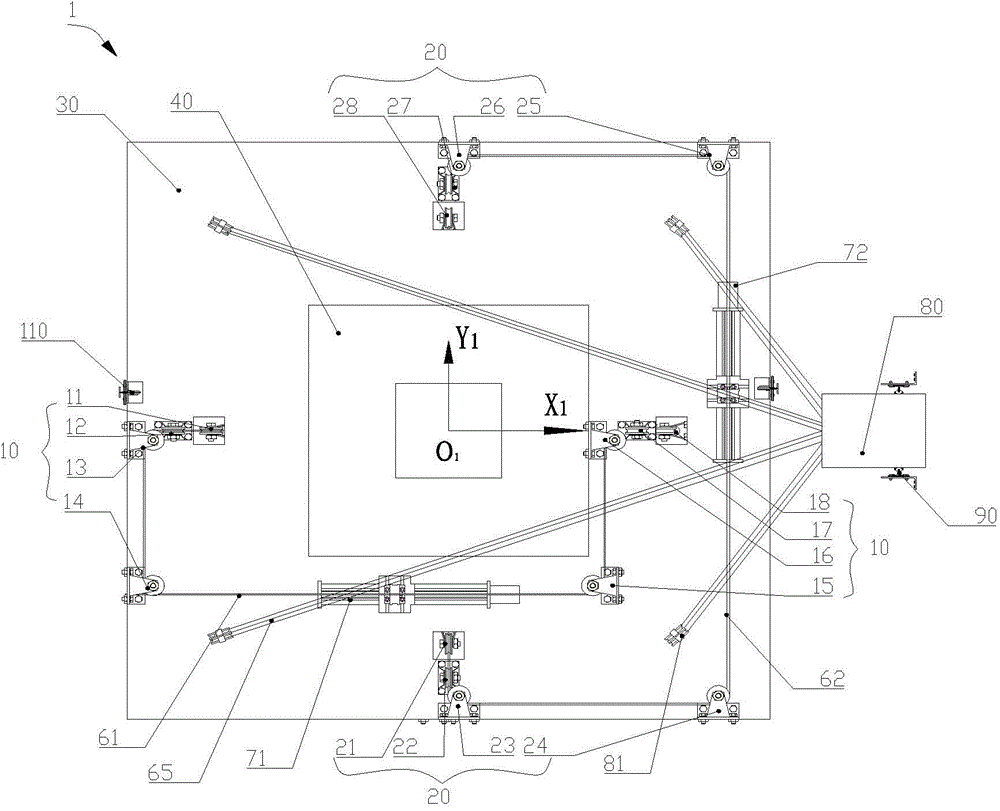
[0042] A space three-degree-of-freedom suspension platform controlled by parallel cables, including an upper platform, a moving platform, a lower platform, a traction system, an XY-axis linear motor system, and a Z-axis linear motor system; It is hinged or Hooke hinged, and orderly bypasses multiple pulley guide units arranged on the upper platform, and the other end is hinged with a spherical hinge or a Hooke hinge at a position symmetrical to the hinge at one end of the moving platform. The upper and lower hinge points of the moving platform are symmetrical with respect to the local coordinate system of the moving platform and have the same distance from the origin. Two flexible cables at the same hinged position of the moving platform form a traction circulation system, which constitutes two traction circulation systems. The flexible cable in the traction circulati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More