

Obstacle detection method for space tether robot in capturing area
A technology for obstacle detection and space tethering, which is used in instruments, computer parts, image data processing, etc., can solve the problems of large storage, large calculation, and low detection efficiency of multi-peak detection breakpoints.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0088] The present invention will be described in detail below in conjunction with the accompanying drawings. It should be noted that the described embodiments are only intended to facilitate the understanding of the present invention, and do not limit it in any way.
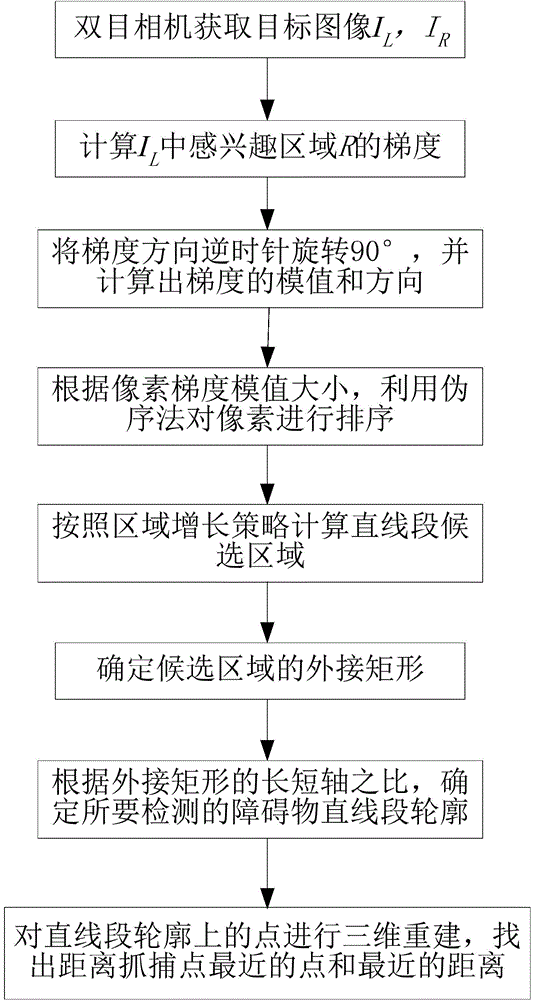
[0089] Such as figure 1 As shown, the detection method for obstacles near the capture point of the space tethered robot provided by the embodiment of the present invention includes:
[0090] Step 1: The binocular camera on the space tethered robot collects the left and right images of the target I L and I R .
[0091] Step 2: In the left image I L Above, set a rectangular capture area R with the capture point O as the center, as the region of interest for processing, in practice the size of the rectangle is set according to the actual situation, in this embodiment it is set to 80*80 pixel size, which can satisfy Require.
[0092] Step 3: Calculate the gradient of the image in the region of interest, and ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More