

Monocular vision mileage calculating device
A monocular vision and computing device technology, applied in the field of intelligent vehicle vision positioning and navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
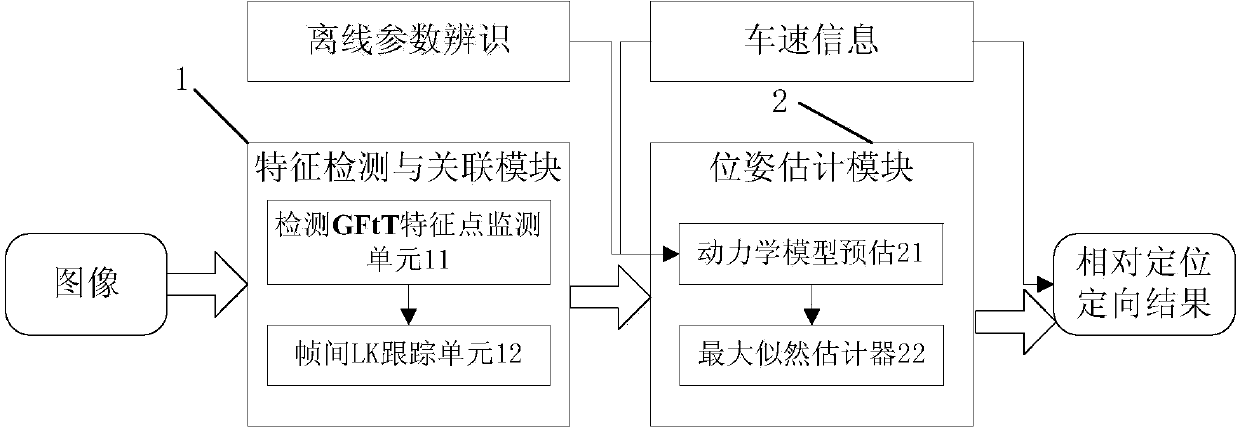
[0045] The method described in the embodiment of the present invention is applied to the occasion where the monocular vision system can obtain vehicle speed information, and the yaw angle and pitch angle components are estimated based on the dynamics of the single-track dynamics model and reasonable linear approximation. By considering the cornering characteristics of the tire, the relationship between the sideslip angle of the center of mass and the variation of the yaw angle is derived, so that a more accurate estimation of the sideslip angle of the center of mass is obtained; by introducing the rotation matrix component caused by the variation of the pitch angle, and Considering the actual range of the pitch angle change of the car body, a reasonable linear approximation is made, and an efficient and accurate initial solution is obtained.
[0046] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More