

A new type of self-lubricating material for high-speed parallel robots
A self-lubricating material and robot technology, applied in the field of parallel robots, can solve the problems of small operating temperature range, affecting the service life and application range of high-speed parallel robots, and large friction damping, so as to achieve a large operating temperature range, improve service life and application Range, small effect of friction damping
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
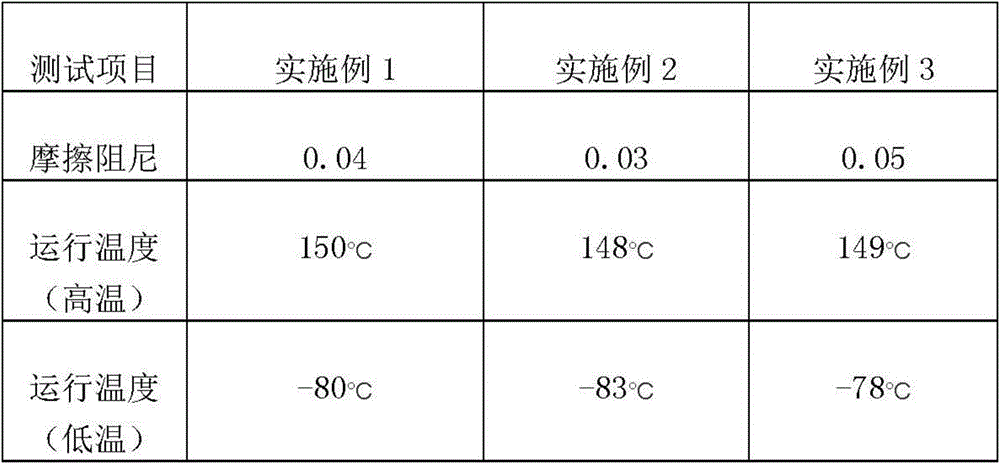
Embodiment 1
[0008] A new type of self-lubricating material for high-speed parallel robots, which includes the following components in parts by weight: 15 parts of molybdenum disulfide, 5 parts of graphite fluoride, 3 parts of boron nitride, 2 parts of polytetrafluoroethylene, 85 parts of nylon, poly Formaldehyde 15 parts, polyparaben 12 parts, zinc-tin alloy 6 parts.
Embodiment 2
[0010] A new type of self-lubricating material for high-speed parallel robots, which includes the following components by weight: 20 parts of molybdenum disulfide, 8 parts of graphite fluoride, 7 parts of boron nitride, 5 parts of polytetrafluoroethylene, 55 parts of nylon, poly Formaldehyde 10 parts, polyparaben 8 parts, zinc tin alloy 4 parts.
Embodiment 3
[0012] A new type of self-lubricating material for high-speed parallel robots, which includes the following components by weight: 18 parts of molybdenum disulfide, 7 parts of graphite fluoride, 5 parts of boron nitride, 3 parts of polytetrafluoroethylene, 70 parts of nylon, poly Formaldehyde 13 parts, polyparaben 10 parts, zinc-tin alloy 5 parts.
[0013] The weight ratio of zinc to tin in the zinc-tin alloy selected in the above embodiment is 3:7, at this time, the self-lubricating property of the zinc-tin alloy is the best.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More