

Fault-tolerant sliding-mode control method for near-space vehicle
A technology for a near-space vehicle and a control method, applied in the field of flight control, can solve problems such as the inability to guarantee the stable flight of the aircraft, the crash of the space vehicle, and the lack of fault tolerance effects.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
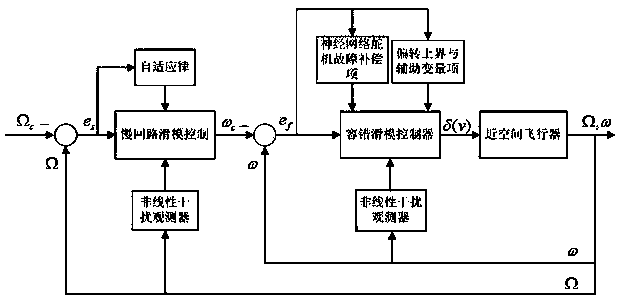
[0075] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0076] Such as figure 1 As shown, the present invention discloses a fault-tolerant sliding mode control method for a near-space aircraft. The attitude loop of the aircraft is divided into a slow loop and a fast loop according to the principle of singular perturbation and the principle of time scale separation. The method is based on the control system of the slow loop , a fast loop control system and a closed-loop control system composed of an aircraft to realize, it is characterized in that, comprising the following steps:
[0077] (1) Transform the slow loop control system and the fast loop control system into an affine nonlinear system equation form, as follows:
[0078] A. The affine nonlinear system equation of the slow loop is:
[0079] In the formula, Ω=[α,β,μ] T is the current attitude angle signal, α, β and μ represent the angle of at...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More