

Method for solving camera homography matrix and projector homography matrix
A homography matrix and projector technology, applied in the field of computer vision, can solve problems affecting calibration accuracy and robustness, calibration accuracy dependence, etc., and achieve the effect of simple method, high precision, and strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
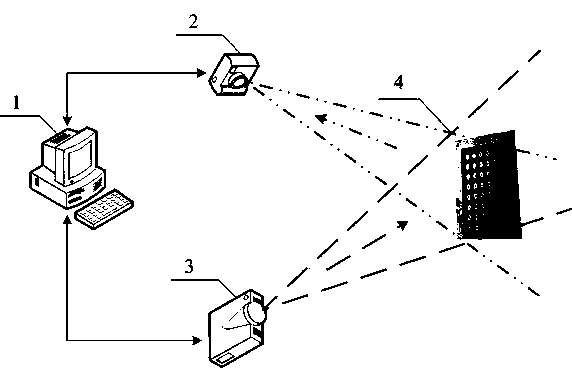
[0032] Below in conjunction with accompanying drawing, the present invention will be further described: as figure 1 Shown, a kind of solution method of camera homography matrix and projector homography matrix, computer 1, video camera 2, projector 3, calibration board 4; It is characterized in that: camera 2 and projector 3 are connected with computer by cable 1 connection, follow the steps below:
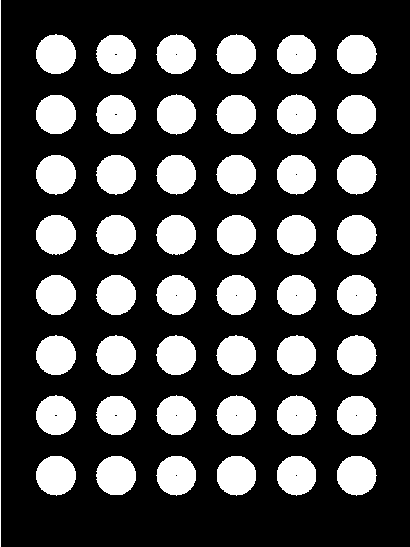
[0033] Step 1, in computer 1, generate a camera calibration image, such as figure 2 As shown, the RGB values of the background color of the camera calibration image are 100, 100, and 100 respectively; the camera calibration image includes 48 white circles with the same radius and a radius of 9mm, arranged in 8 rows and 6 columns, between the centers of two adjacent circles The distance is 23.5mm. Use A4 paper to print out the calibration image of the camera, and paste it on a flat board to form the calibration board 4 .
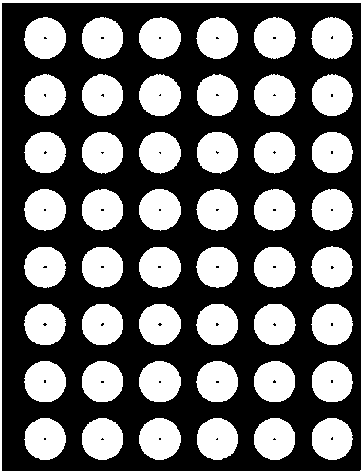
[0034] Step 2, in computer 1, generate a projector cal...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More