

An Adaptive Decoupling Control Method Based on Motion State Synchronization
A decoupling control, motion state technology, applied in aircraft control, transportation and packaging, fluid pressure actuation devices, etc., can solve problems such as damage to the system, force disputes, affecting drive efficiency and control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
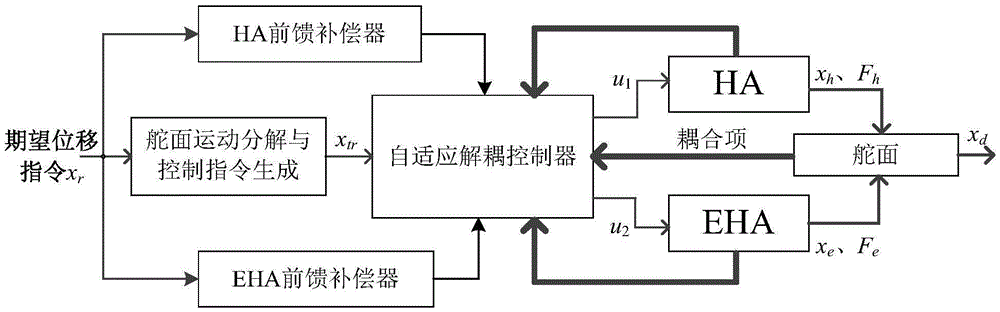
[0053] The invention provides an adaptive decoupling control method based on motion state synchronization to eliminate the influence of coupling items on the output of non-similar redundant hybrid actuation systems and overcome the problem of force disputes between different actuators.
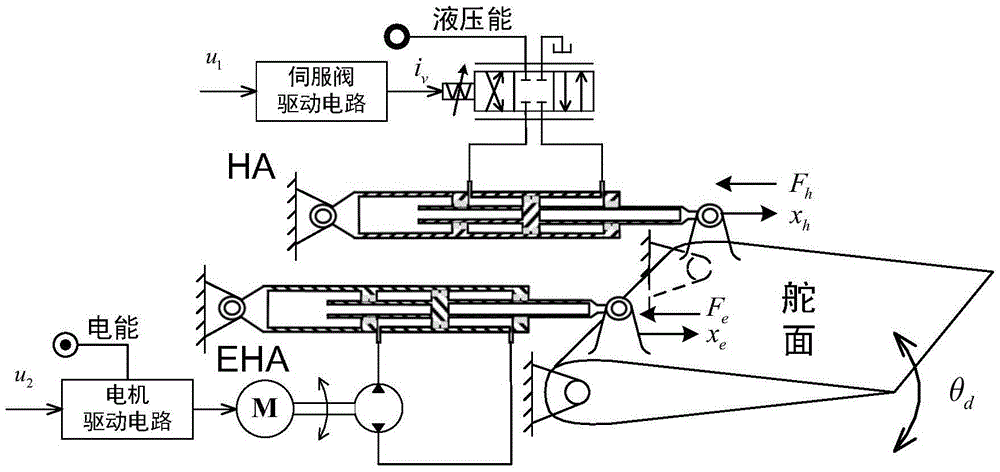
[0054] like figure 1 As shown, the non-similar redundant hybrid actuation system composed of HA and EHA drives the rudder surface in parallel. HA controls the flow of the hydraulic cylinder by controlling the servo valve drive circuit, thereby controlling the displacement of the piston of the HA actuator x h . EHA drives the quantitative plunger pump to change the flow of the pump by controlling the motor drive circuit, thereby controlling the displacement of the piston of the EHA actuator x e . figure 1 Middle F h , F e Respectively represent the for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More