

Autonomous control method and device of sailing ship and sailing ship
An autonomous control and sailing technology, applied in the direction of non-electric variable control, control/adjustment system, three-dimensional position/channel control, etc., can solve the control method without the integrity of sail autonomous driving, and cannot well realize the sail state of the sailing path The control of rudder angle control and other issues, to achieve the effect of improving autonomous control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
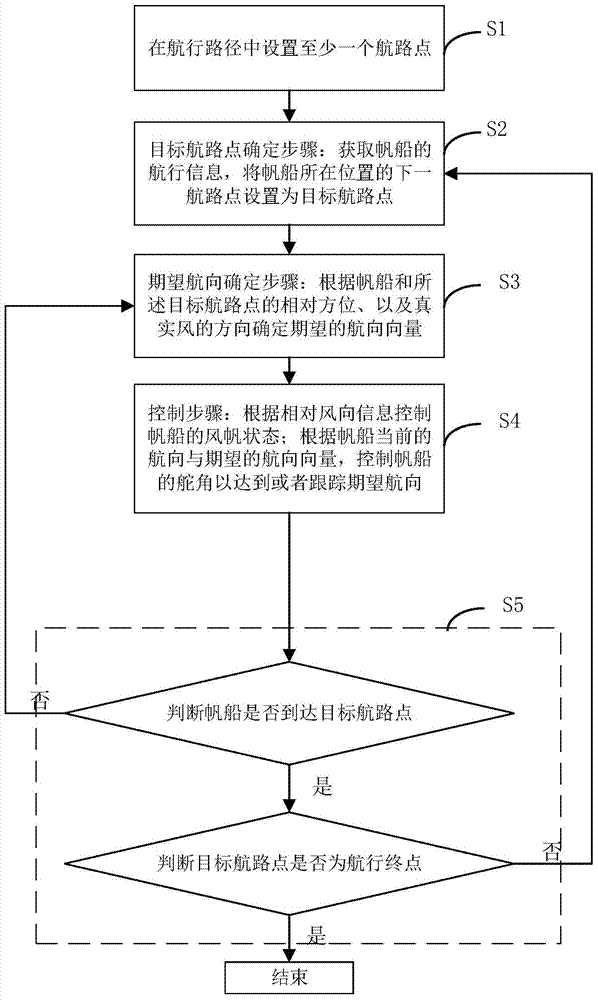
[0067] Such as figure 1 Shown is a flow chart of the sailboat autonomous control method provided by the preferred embodiment of the present invention. The method includes the following steps:
[0068] S1. Set at least one waypoint in the navigation path. Among them, the last waypoint is the sailing end of the sailboat.
[0069] Specifically, the system or the user of the unmanned sailing ship determines several waypoints within the range of the route and numbers them sequentially, and sets waypoint M1, waypoint M2...waypoint Mn in sequence, wherein waypoint M1 is the first waypoint point, the waypoint Mn is the last waypoint, which is the end of the voyage. The position of the waypoint is described by longitude and latitude values.
[0070] S2. The step of determining the target waypoint: obtaining the navigation information of the sailboat, and setting the next waypoint at the location of the sailboat as the target waypoint.
[0071] Specifically, the first waypoint is s...
Embodiment 2
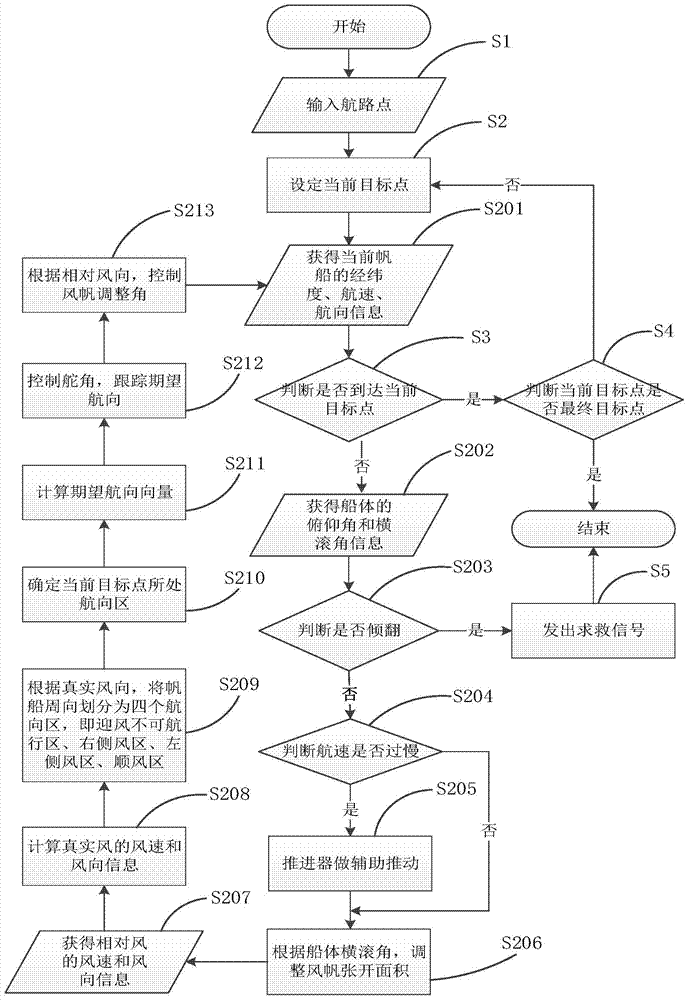
[0088] On the basis of the above examples, if figure 2 In step S201 shown, the longitude information and latitude information of the sailboat are obtained through the built-in global positioning module of the sailboat, and at the same time, the distance between the sailboat and the above-mentioned target waypoint is calculated according to the above-mentioned longitude information and the above-mentioned latitude information. When the above-mentioned distance is less than the preset When the threshold is reached, it is confirmed that the sailboat has reached the above target waypoint.
[0089] For example, set the above threshold to 200 meters, obtain the longitude information and latitude information of the sailboat in real time through the global positioning module (it can be understood as obtaining according to a preset cycle), calculate the current position of the sailboat, and at the same time, call it from the pre-stored data in the background The position of the curren...
specific Embodiment approach
[0104] The specific implementation is as follows:
[0105] First, one end of the sail is set on the mast, and the other end is pulled by the sail rope;
[0106] Situation 1: The sail can be fully wound on the mast, and the sail is not affected by the wind at this time;
[0107] Situation 2: The sail can be fully opened, and the area of the sail affected by the wind is the largest at this time;
[0108] Situation 3: It is also possible to let the sail be partly wound on the mast and partly spread out, at this time, part of the area of the sail is affected by the wind.
[0109] Then, adjust the wind area of the sail according to the calculation result. It can be understood that under the same wind speed, wind direction, adjustment angle, etc., the size of the wind-receiving area of the sail determines the size of the propulsion force obtained by the sailboat from the wind and the size of the roll moment of the sailboat receiving the wind, that is, the larger the wind-r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More