

Underwater active vision tracking method applied to bionic robot fish
An active vision and robotic fish technology, applied in instruments, computer parts, computing, etc., can solve the problems of difficult to achieve fast and accurate identification and positioning, the target shape setting is not ideal, and the environmental adaptability needs to be improved. Good performance, regular shape, small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] In order to make the objectives, technical solutions, and advantages of the present invention clearer, the following further describes the present invention in detail in conjunction with specific embodiments and with reference to the accompanying drawings. Although this article may provide an example of a parameter containing a specific value, it should be understood that the parameter need not be exactly equal to the corresponding value, but can be approximated to the value within acceptable error tolerances or design constraints.
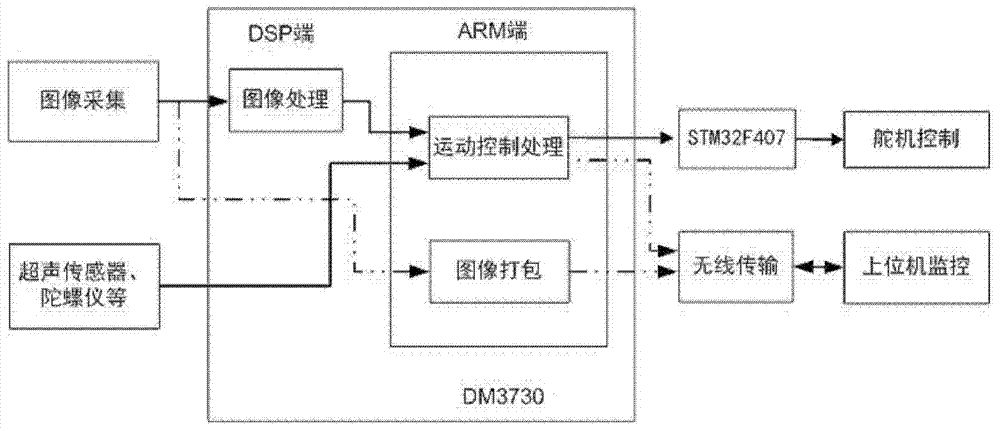
[0035] The invention constructs a hardware circuit architecture suitable for active vision of an embedded system, and provides abundant resources to fulfill the task requirements of underwater vision. The built hardware architecture is like Figure 1a Shown include image acquisition unit, ultrasonic sensor and gyroscope, etc., DM3730 main control chip, STM32F407 steering gear control unit, wireless transmission module, upper computer monitoring ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More