

Robot rescue system used in complicated environment
A complex environment, robot technology, applied in the field of rescue systems, can solve problems such as high price, high operating space requirements, affecting rescue work, etc., and achieve the effect of light weight and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
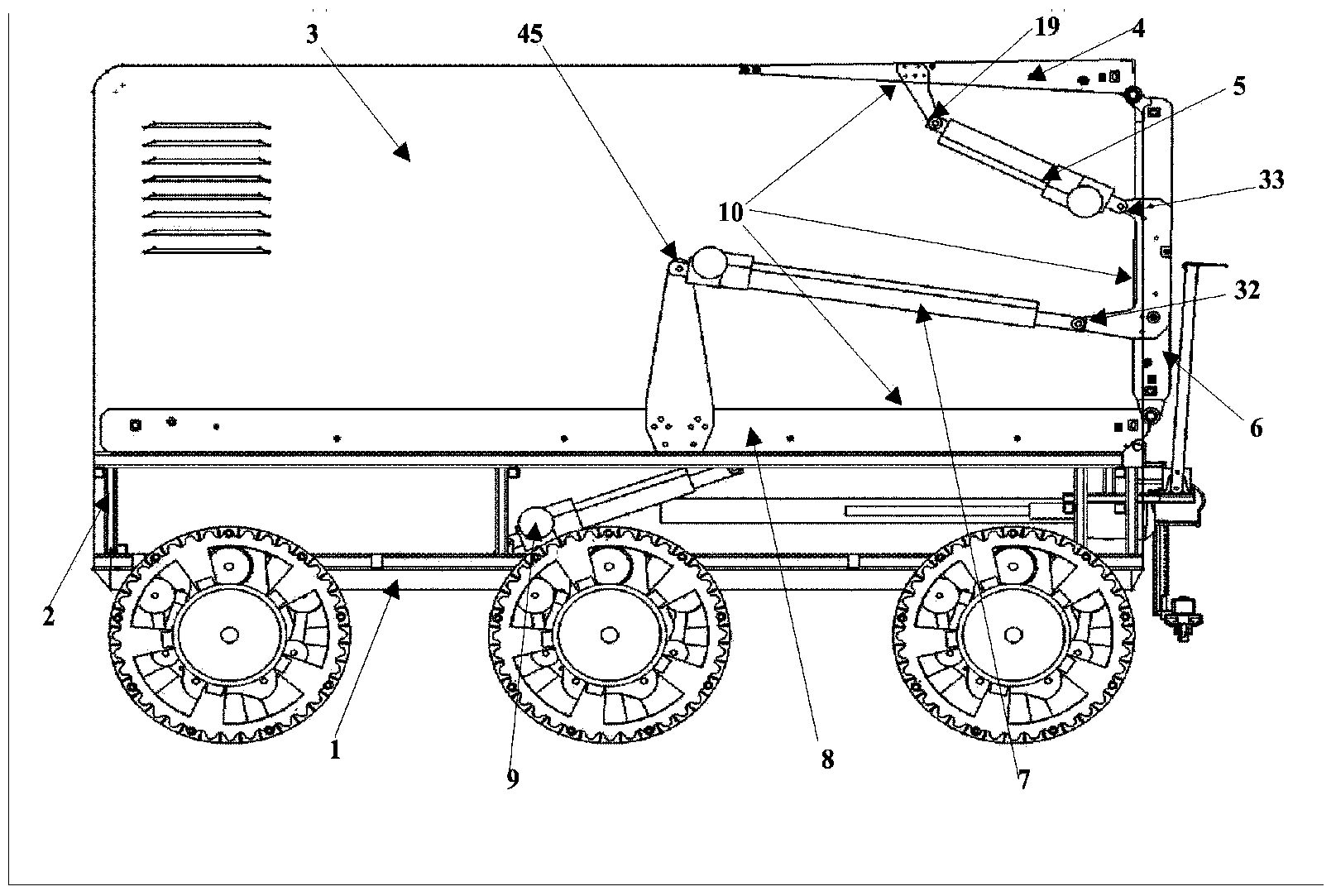
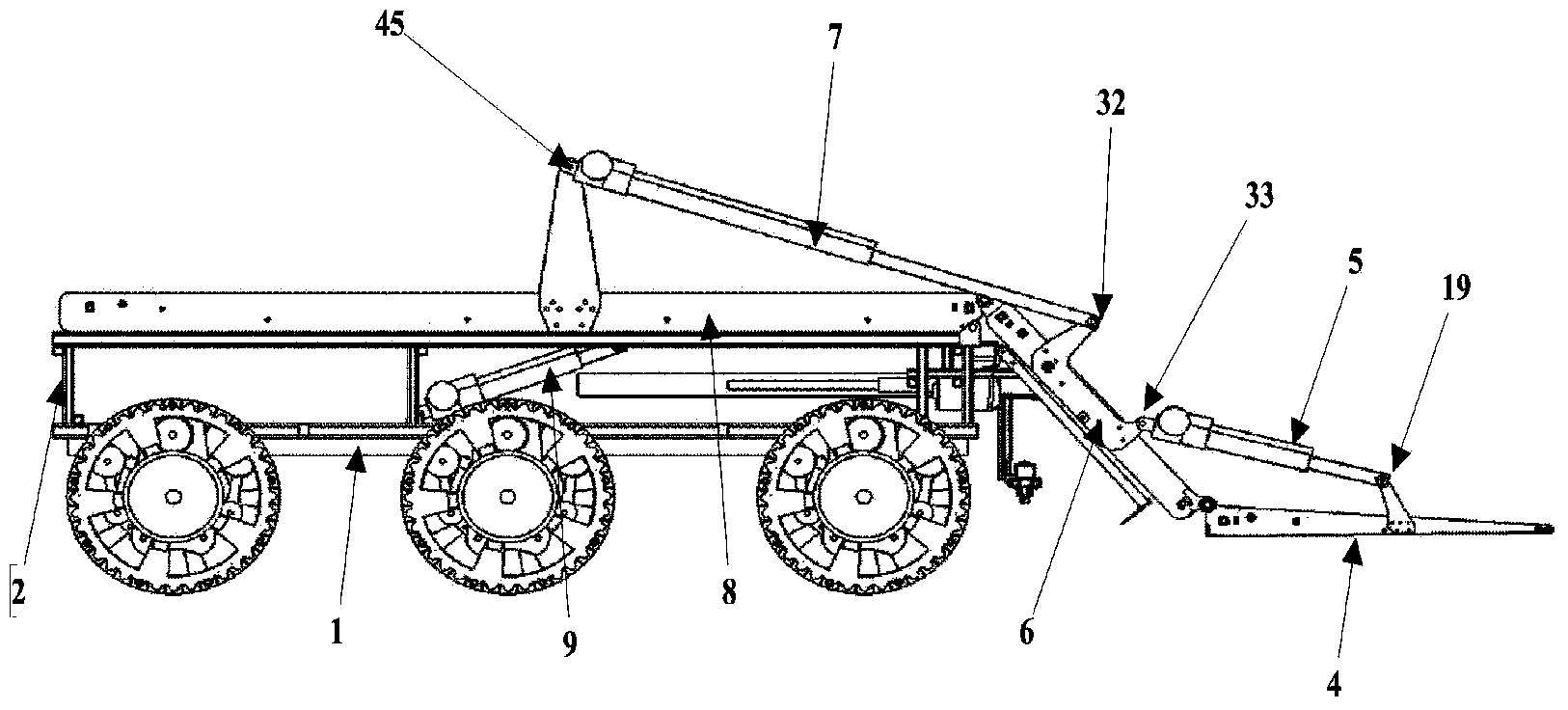
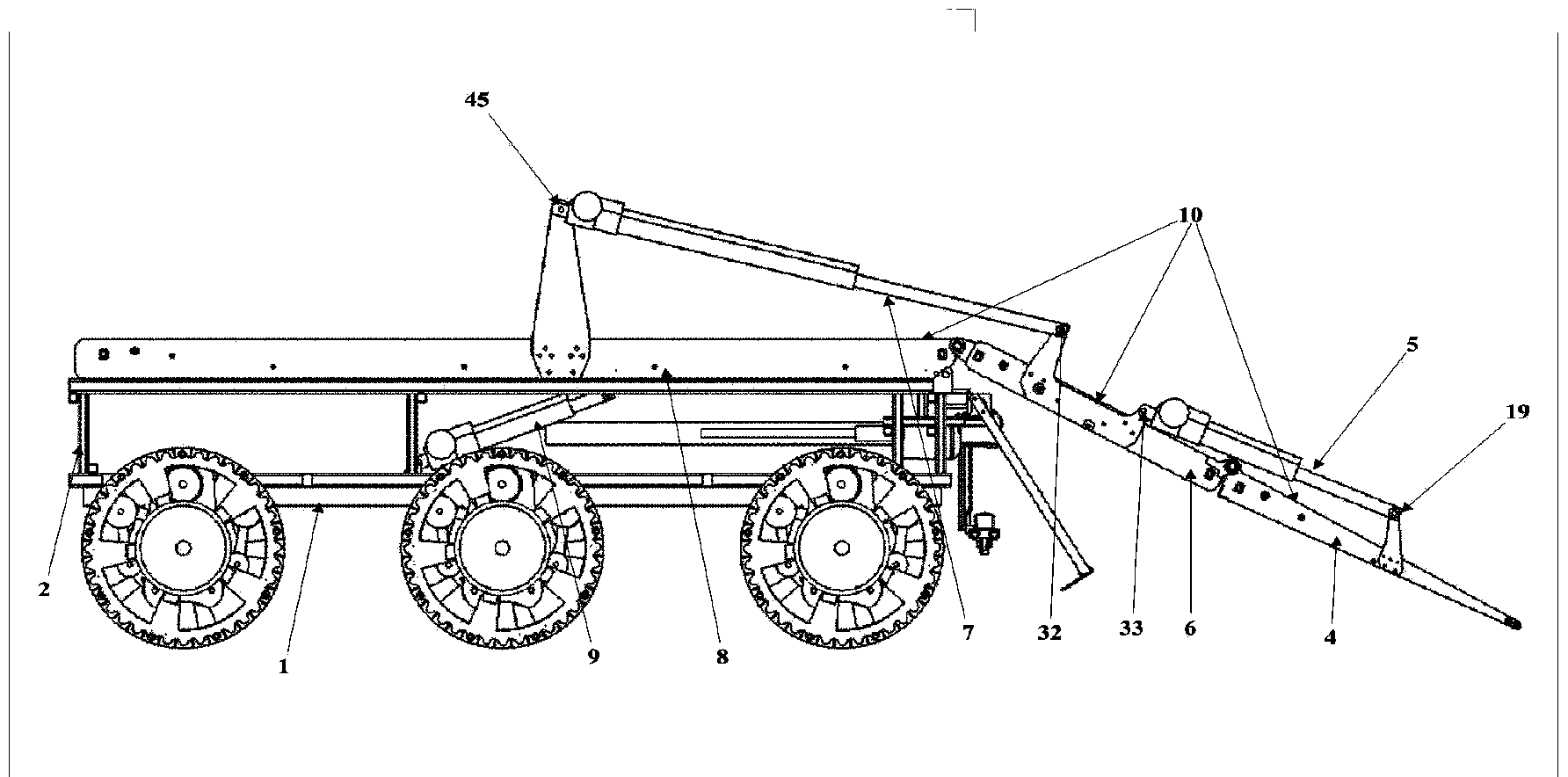
[0049] The complex environment robot rescue system of the present invention comprises a robot walking chassis 1, a vehicle frame 2, a robot shell 3, a storage system and an obstacle removal device 103 as an accessory system and a multifunctional executive arm system 104, composed of figure 1 — Figure 7 It can be seen that the storage system of the robot includes a personnel placement device ( Figure 7 ) and angle adjustment system (5, 5', 7, 7', 9).
[0050] One end of the long-distance electric push rod 7, 7' is hinged on the upper support 45 of the long-distance electric push rod, and the other end stretches when it receives the control signal. Therefore be hinged on the long-distance electric push rod 7,7 ' another end is hinged with the intermediate transition device 6 and rotates around the hinge shaft 47 on the personnel placement device 8. S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More