

LabVIEW-based (laboratory virtual instrumentation engineering workbench based) microphone array sound source localization method and device
A microphone array and sound source localization technology, applied in the field of localization, can solve difficult problems and achieve the effects of reducing model errors, improving accuracy, and improving real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
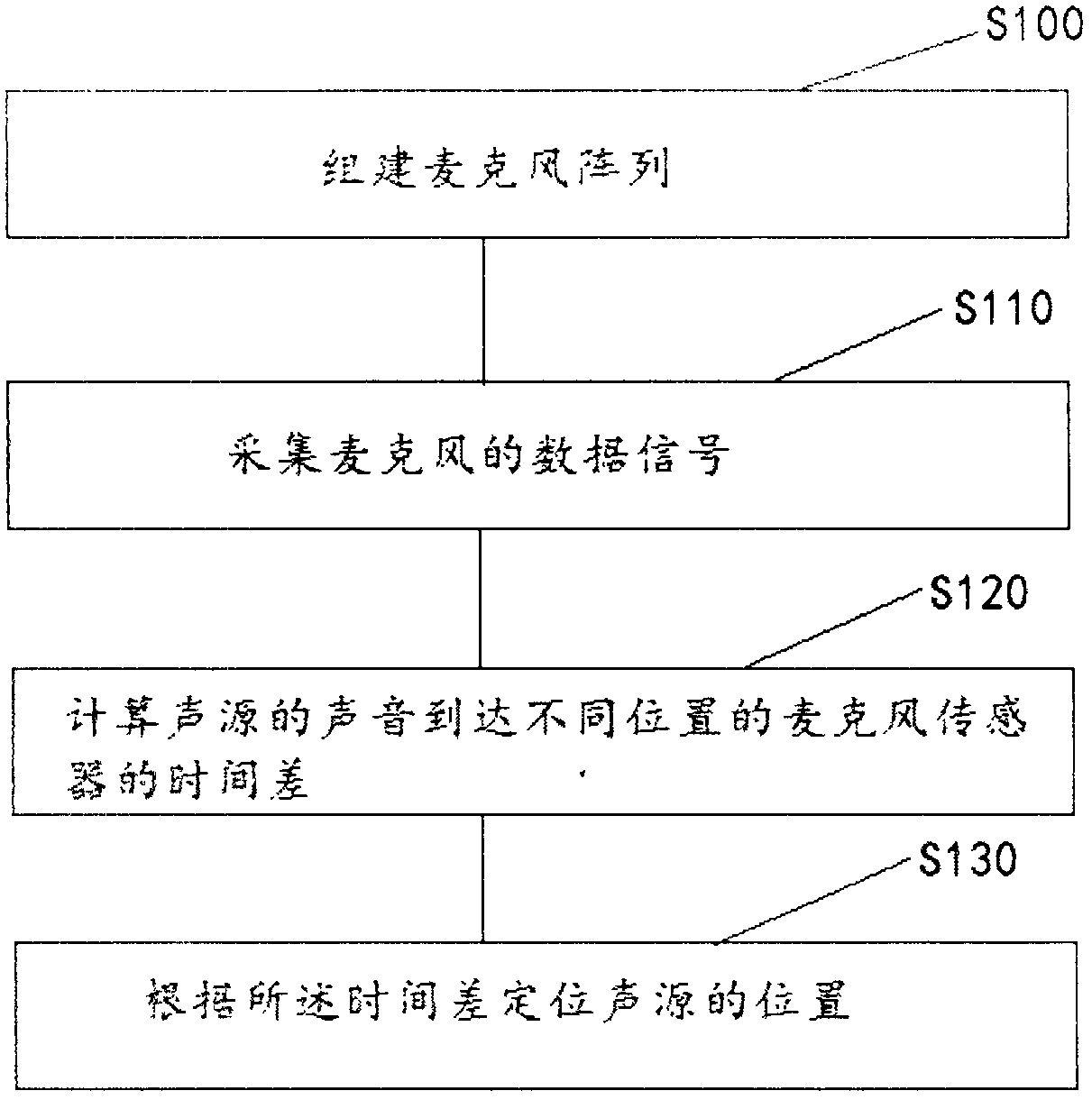
[0032] Such as figure 1 As shown, the microphone array sound source localization method based on LabVIEW includes the following steps:
[0033] Step S100: building a microphone array;
[0034] Step S110: collecting the data signal of the microphone;
[0035] Step S120: Calculate the time difference between the sound of the sound source reaching the microphone sensors at different positions;
[0036] Step S130: Locate the position of the sound source according to the time difference.
[0037] In this embodiment, the microphone array is used to realize the three-dimensional spatial positioning of the sound source, which improves the accuracy of the sound source positioning, effectively suppresses the interference of uninteresting sounds such as noise, and calculates the time difference between the sound of the sound source arriving at the microphone sensor at different positions, reducing The complexity of the algorithm is reduced, and the real-time performance of the pickup ...
Embodiment 2
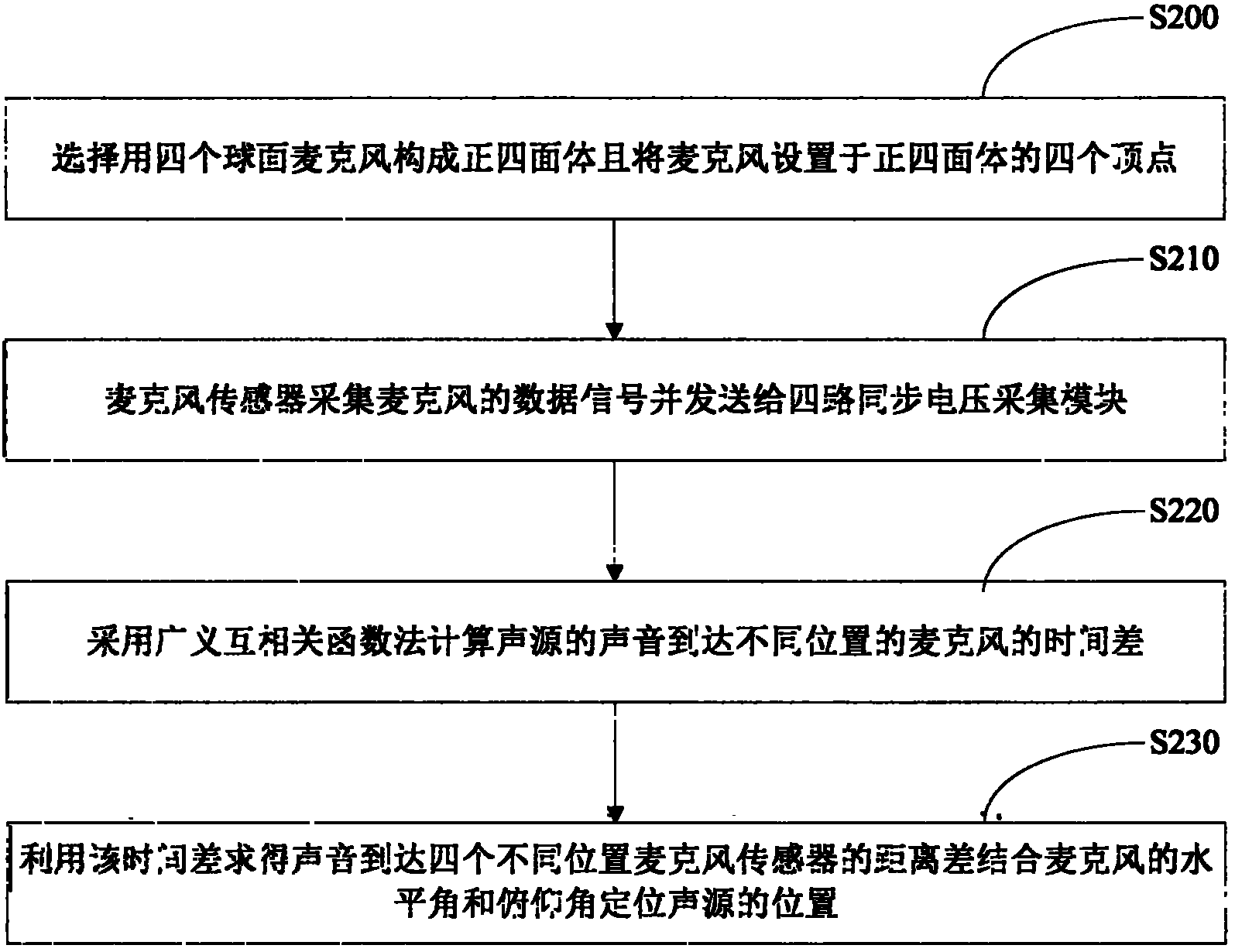
[0039] Such as figure 2 As shown, the microphone array sound source localization method based on LabVIEW includes the following steps:
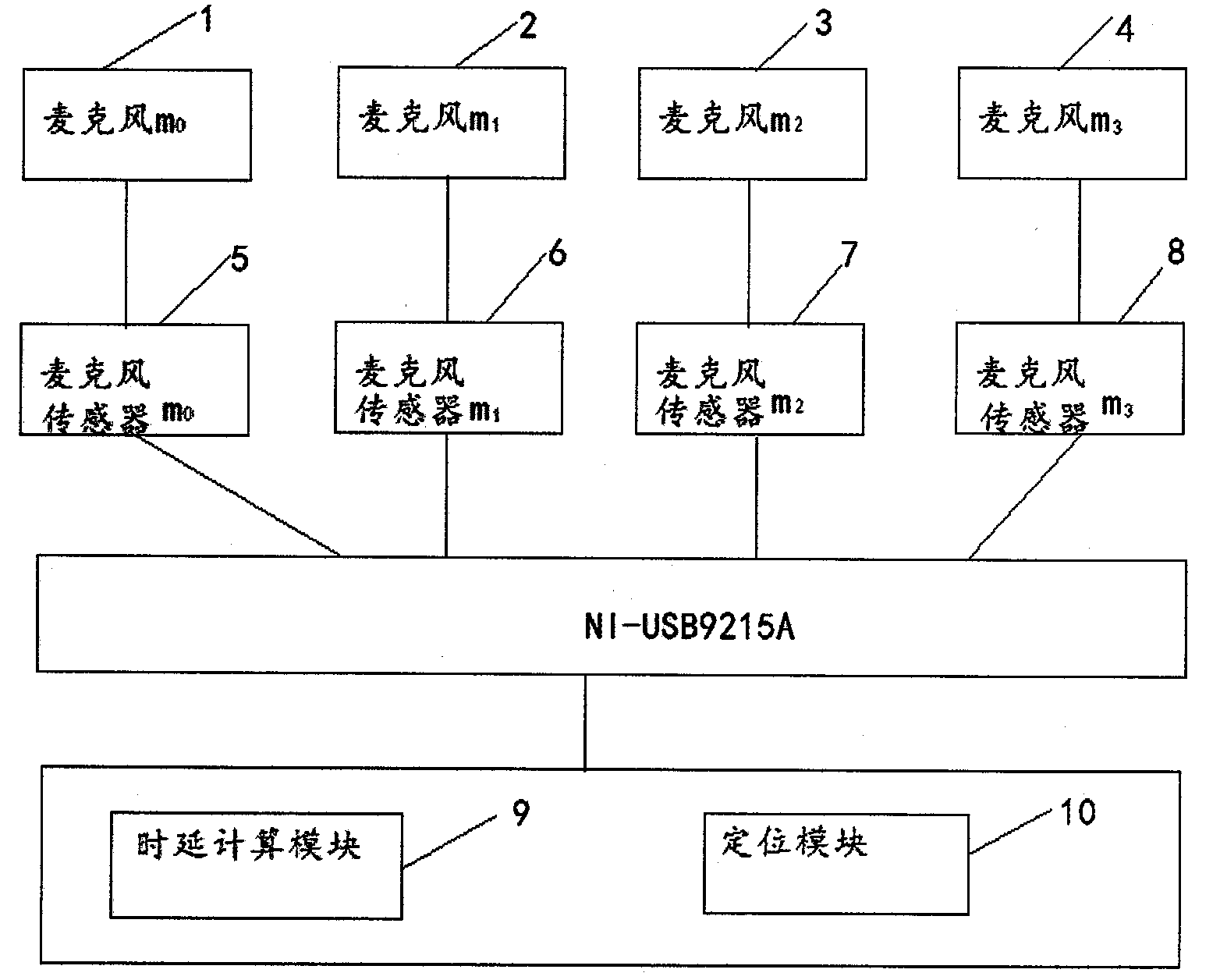
[0040] Step S200: Choose to use four spherical microphones to form a regular tetrahedron and set the microphones on the four vertices of the regular tetrahedron, microphone m 0 1. Microphone m 1 2. Microphone m 2 3 and microphone m 3 4 is the position of the four spherical microphones in the space model, and the space Cartesian coordinate system is established with the circumcircle center of the tetrahedron formed by the four spherical microphones as the coordinate origin 0. m 0 On the positive half of the z-axis, m 1 、m 2 and m 3 are all below the origin, m 1 Projection on the plane xOy on the positive x-axis, m 2 and m 3 The connecting line is parallel to the y-axis. Then the coordinates of the four microphones in the three-dimensional space model are: m 2 ( - ...
Embodiment 3
[0079] Such as Figure 4 Shown, the microphone array sound source localization device based on LabVIEW, including:
[0080] The building module is used to build a microphone array; the building module includes four spherical microphones, and the four spherical microphones form a regular tetrahedron and the microphones are arranged on the four vertices of the regular tetrahedron, and the geometric center of the regular tetrahedron is a three-dimensional coordinate The origin of the system and one of the microphones is located on the positive half axis of the Z axis;
[0081] The acquisition module is used to collect the data signal of the microphone; the acquisition module includes a microphone sensor and four synchronous voltage acquisition modules, and the data signal collected by the microphone sensor is input into the four synchronous voltage acquisition module in the form of an analog voltage signal; the four synchronous voltage The acquisition module is NI USB-9215A;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More