

Standard pose calibration method for six-degree-of-freedom parallel robot used for Stewart platform structure
A calibration method and robot technology, which can be applied to instruments, measuring devices, navigation and calculation tools, etc., can solve the problems of difficult implementation and low computing efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The technical solutions of the present invention will be described in detail below in conjunction with specific embodiments.
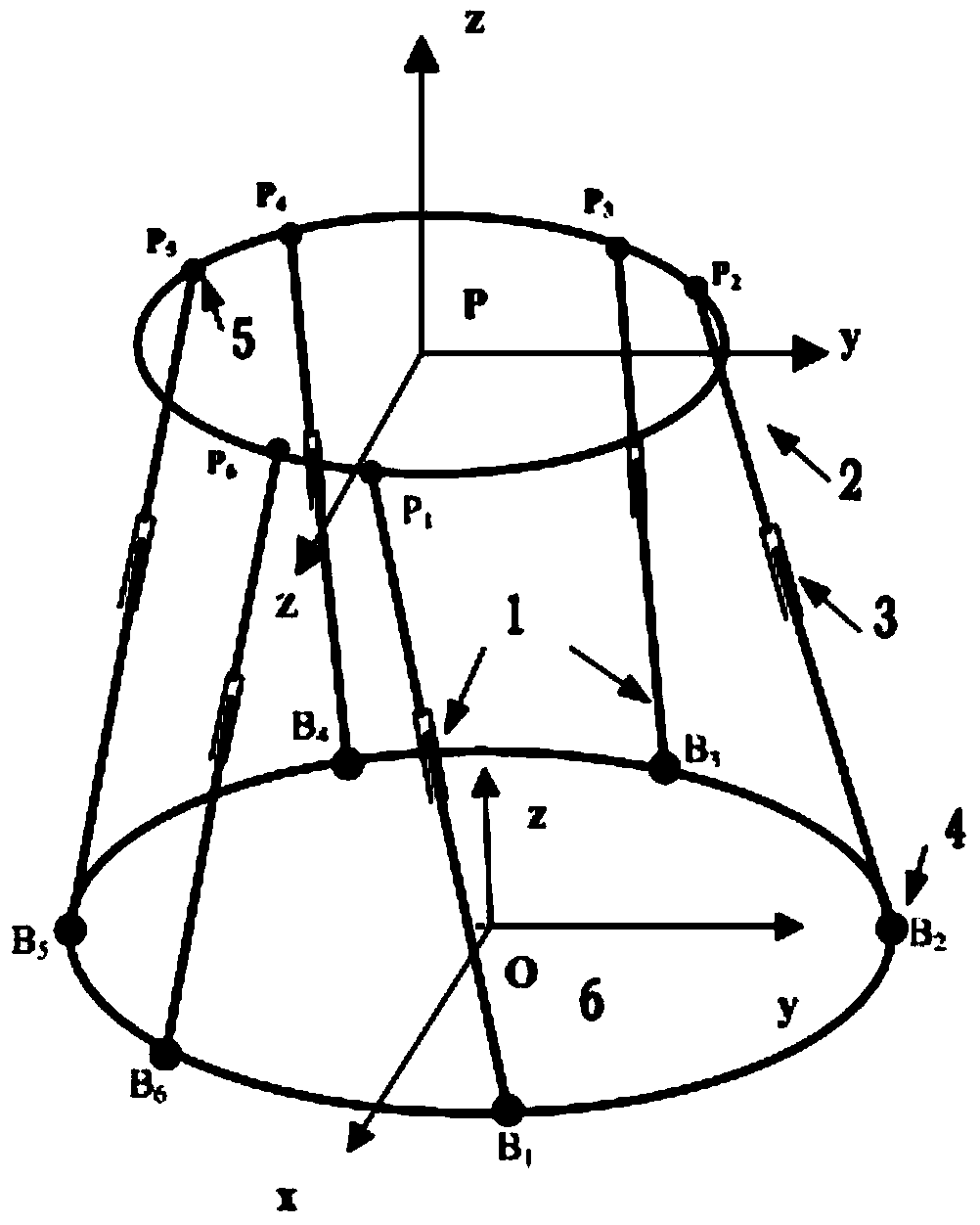
[0062] Such as figure 1 Shown is the six-degree-of-freedom parallel robot that is used for Stewart platform configuration of the present invention, and its benchmark pose calibration method comprises the following steps:
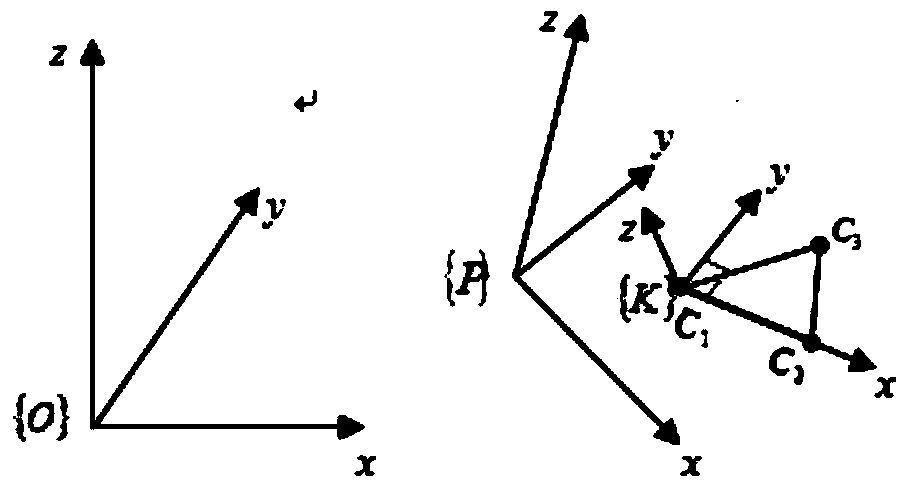
[0063] 1. Establish the base coordinate system {O} on the base of the parallel robot and the motion platform coordinate system {P} on the motion platform.
[0064] 2. In the case of an open-chain six-degree-of-freedom parallel robot mechanism, use a three-coordinate measuring instrument, such as figure 1 As shown, calibrate the center B of the six Hookee hinges of the parallel robot i and 6 spherical hinge centers P i Position coordinate vectors under {O} and {P} respectively O b i and P p i ; Among them, the subscript i=1,2,...,6 indicates the sequence numbers of Hookee hinges and spherical hinges.
[0065] 6 Hooker H...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More