

Intelligent robot charging method and automatically-charged intelligent robot
The technology of an intelligent robot and a charging method, which is applied in the field of intelligent robots, can solve problems such as the inability to find a charging light source and low operating efficiency of the robot, and achieve the effects of improving work and charging efficiency, and improving battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
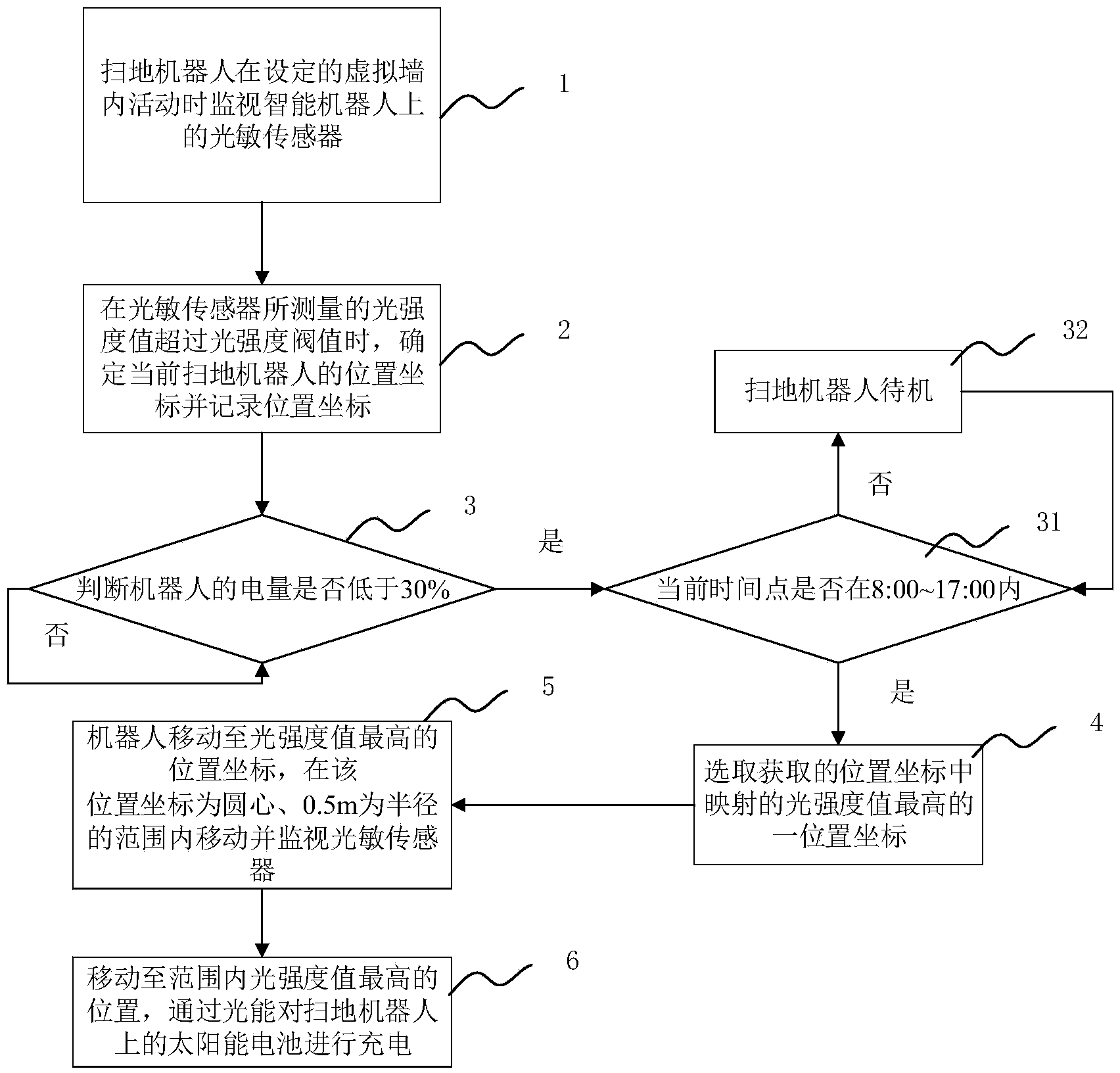
[0048] figure 1 For the flow chart of the charging method of the intelligent robot of the present embodiment, as figure 1 As shown, the charging method of the intelligent robot involved in this embodiment includes the following steps:
[0049] Step 1. As an intelligent robot, the sweeping robot monitors the photosensitive sensor on the intelligent robot when moving within the set virtual wall.
[0050]Sweeping robot, also known as automatic cleaning machine, intelligent vacuum cleaner, robot vacuum cleaner, etc., is a kind of smart household appliances, which can automatically complete the floor cleaning work in the room by virtue of certain artificial intelligence. Generally, brushing and vacuuming are used to absorb the debris on the ground into its own garbage storage box, so as to complete the function of ground cleaning. Generally speaking, robots that complete cleaning, vacuuming, and mopping the floor are also collectively classified as sweeping robots. The body of t...
Embodiment 2
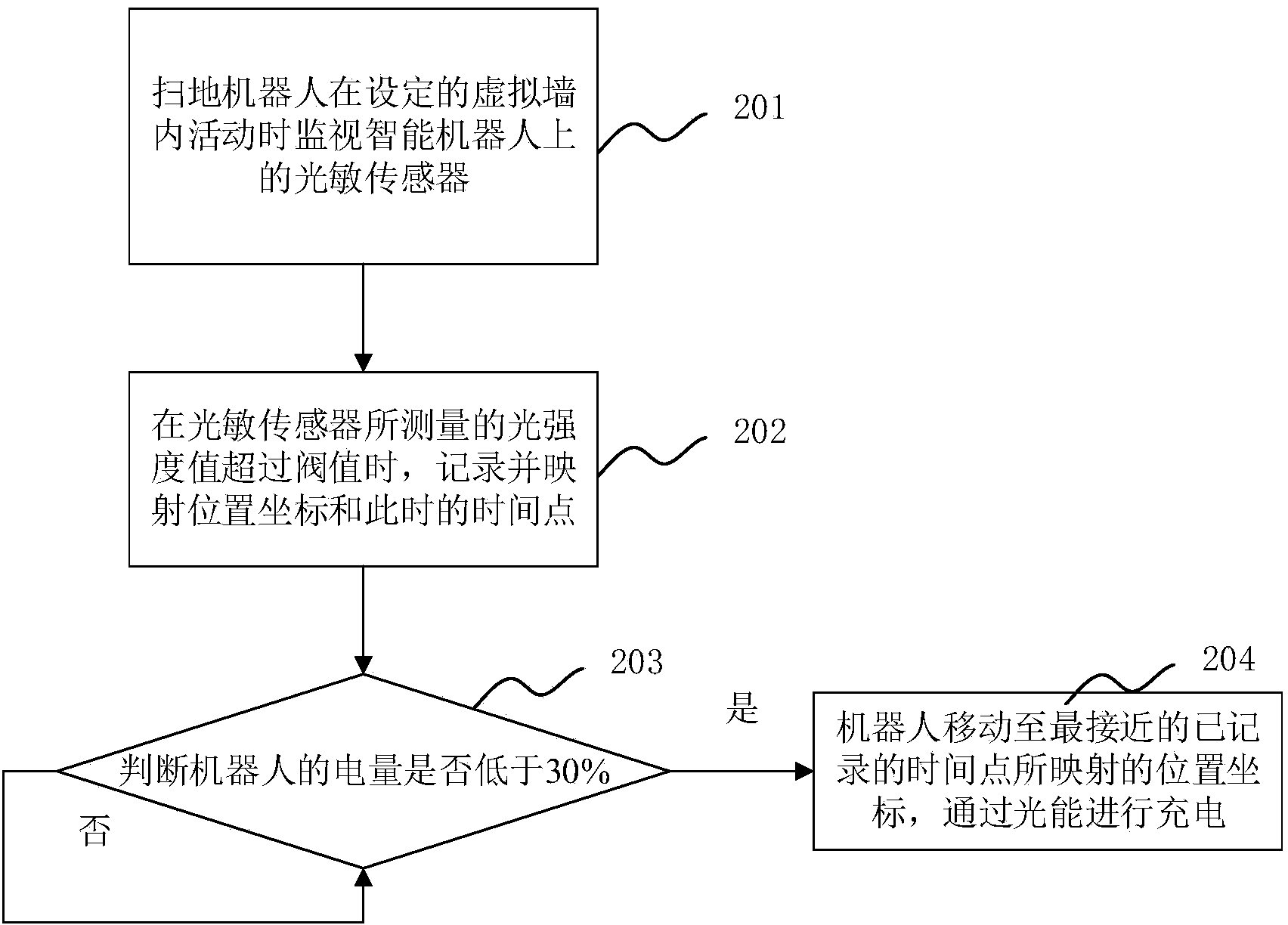
[0074] image 3 Be the flowchart of the charging method of the intelligent robot of embodiment 2, as image 3 As shown, the difference between this embodiment and Embodiment 1 is that the charging method for the intelligent robot involved in Embodiment 2 includes the following steps:
[0075] Step 201, the intelligent robot monitors the photosensitive sensor on the intelligent robot when moving within the set virtual wall;
[0076] Step 202, when the light intensity value measured by the photosensitive sensor exceeds a light intensity threshold value, determine the position coordinates of the intelligent robot according to the virtual wall at this time, record and map the position coordinates and the time point at this time, the time point does not include the date, Include hours, minutes, and seconds only;
[0077] Step 203, judge whether the battery power of the intelligent robot is lower than 30% of the total power, if so, run step 204, otherwise repeat step 203;
[0078...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More