

Spatial positioning method not needing teaching robot system
A technology for teaching robots and spatial positioning, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as long time, industrial robot obstruction, and time consumption accounting for a large proportion, and achieve the effect of operation automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Describe the present invention below in conjunction with specific embodiment:
[0056] This embodiment takes the palletizing work of industrial robots as an example to describe:
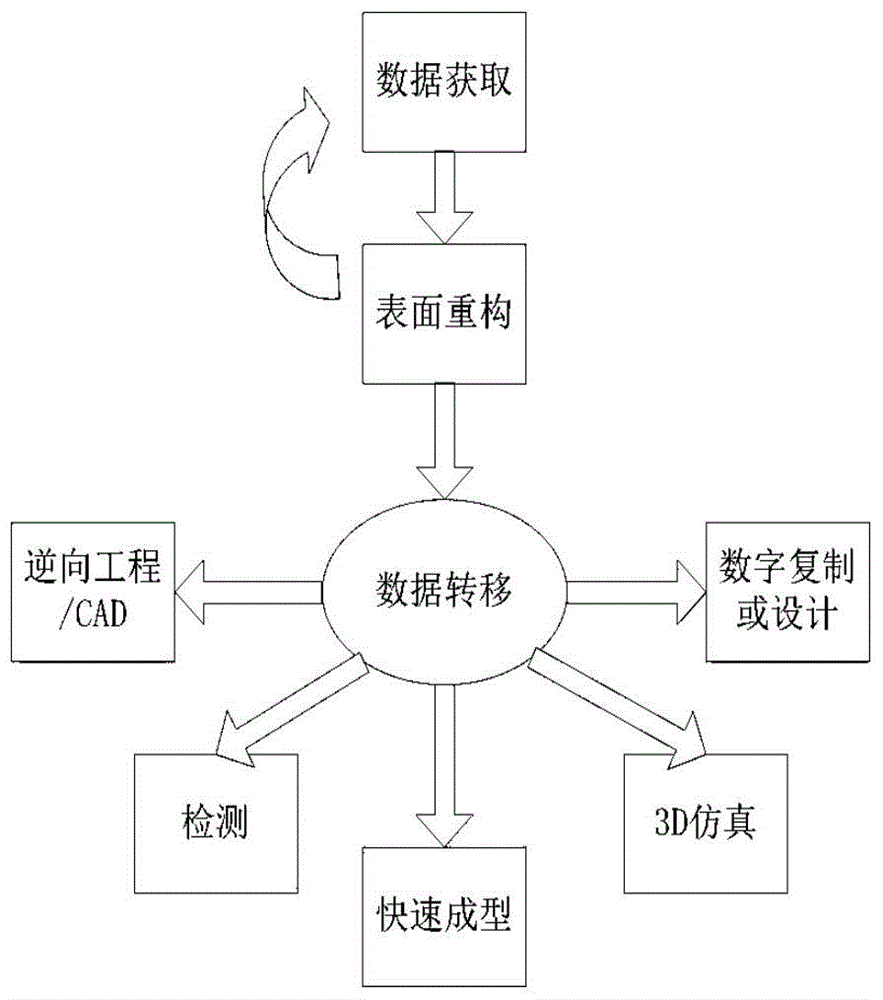
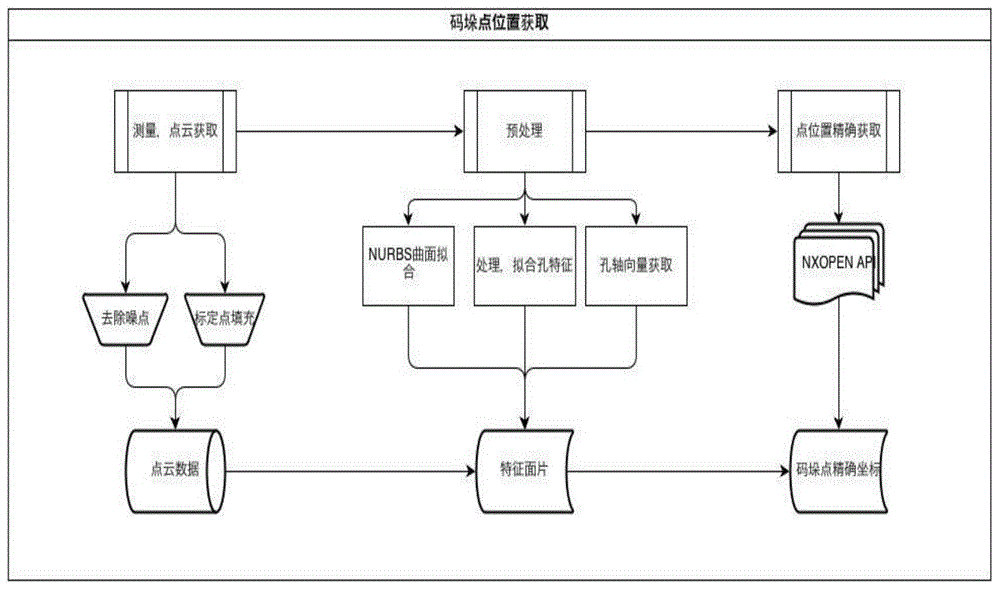
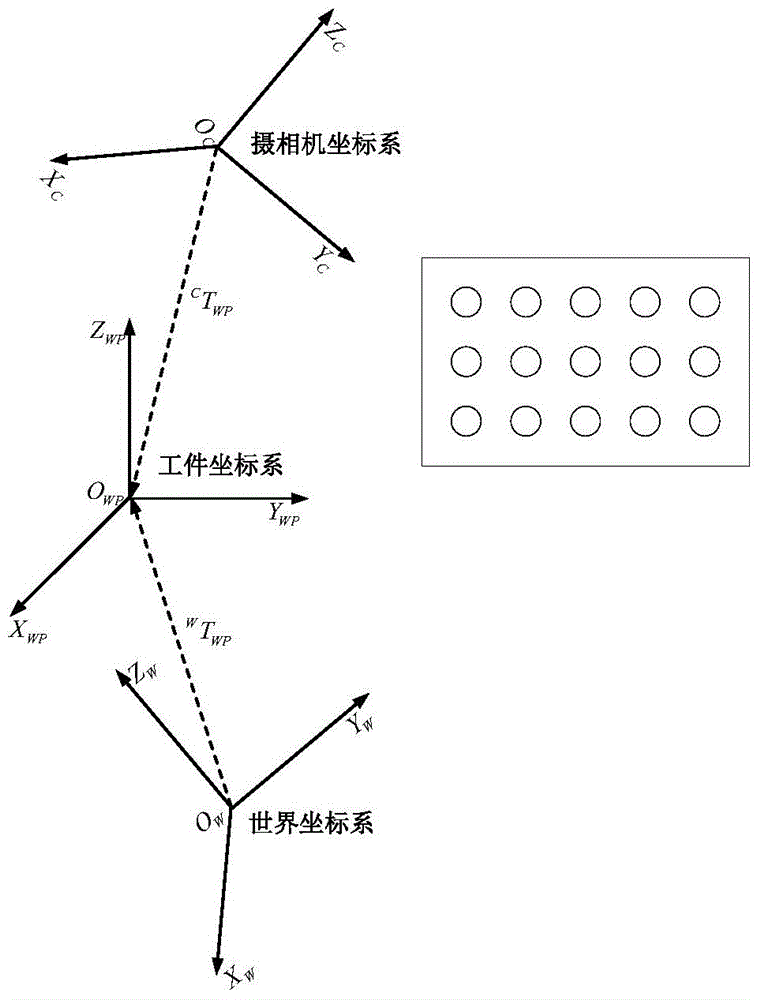
[0057] The innovative teaching-free robot system proposed by the present invention is mainly divided into high-speed and accurate optical measurement system, coordinate change and control code automatic generation module. First, the user uses the handyScan 3D scanner to obtain a large number of point cloud data of the measured object and generate a 3D model of the measured object, then perform operations such as noise removal, surface feature preprocessing, and feature point extraction, and finally obtain the working target point in the camera Coordinates in the coordinate system; then, use the coordinate transformation algorithm to convert the coordinates of the work target point in the camera coordinate system into coordinates in the robot world coordinate system, so that the robot can be us...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More