

Three-degree-of-freedom front arm blood collection robot
A technology with a degree of freedom and robotics, applied in the directions of sensors, medical science, diagnostic recording/measurement, etc., to achieve the effect of large working space, high safety, automation and intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following are specific embodiments of the present invention and the accompanying drawings to further describe the technical solutions of the present invention, but the present invention is not limited to these embodiments.
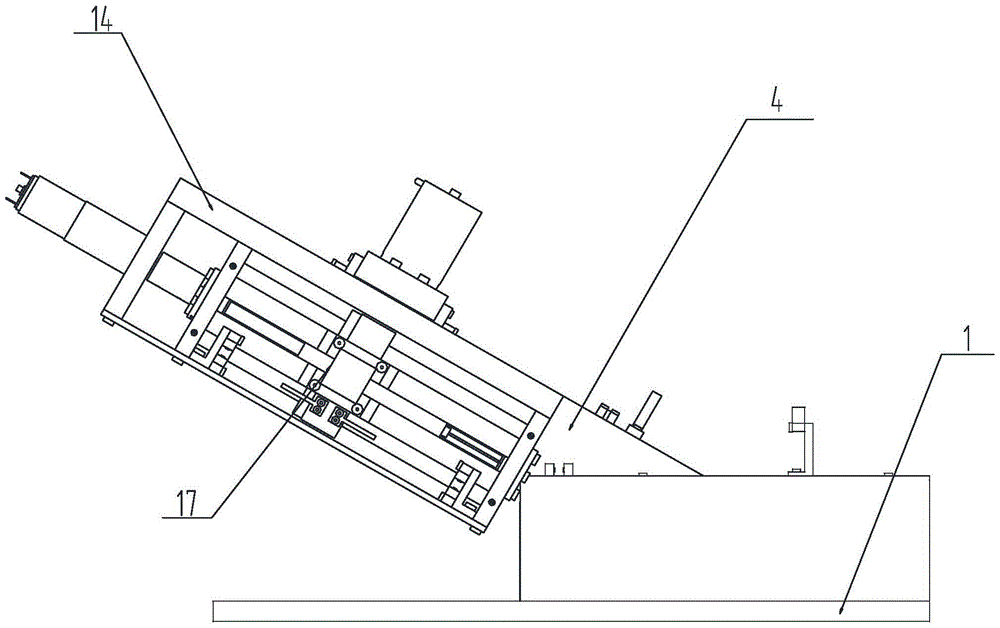
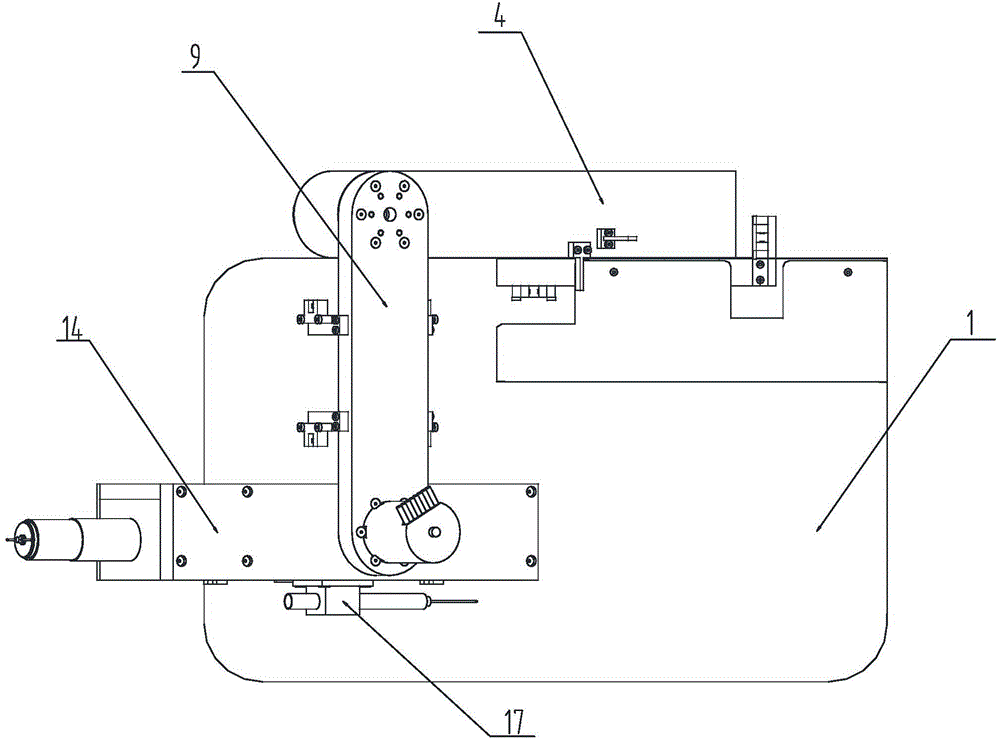
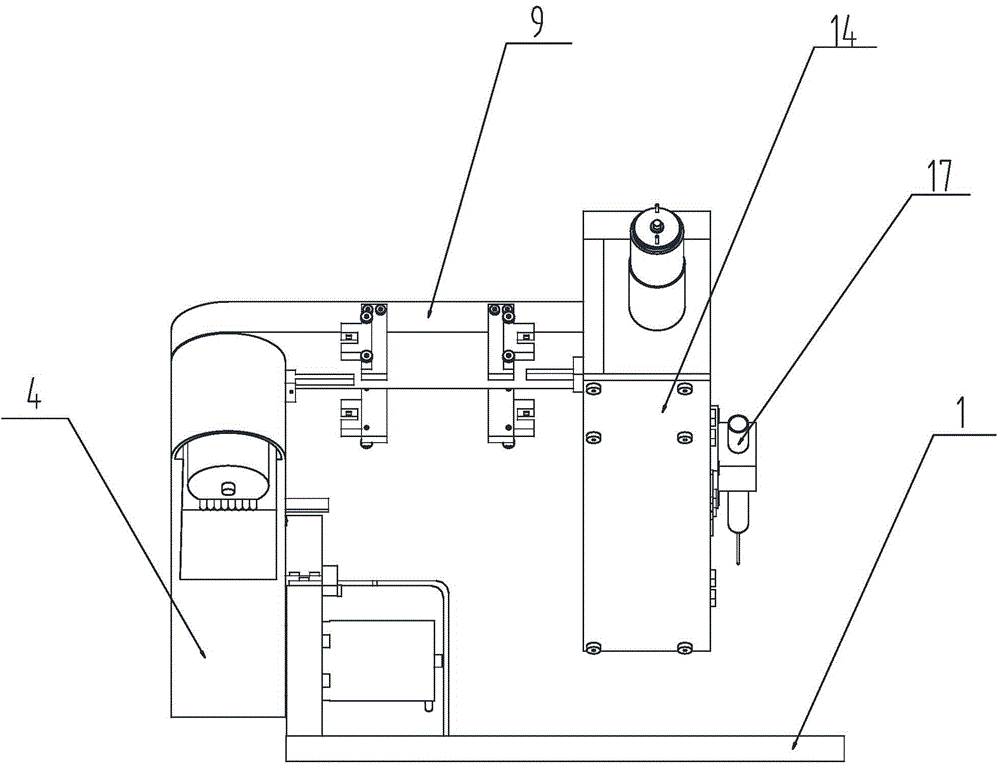
[0029] like Figure 1 to Figure 7 As shown, the three-degree-of-freedom forearm blood sampling robot includes a workbench 1, a mechanical arm is set on the workbench 1, and a blood sampling needle 17 is set on the driving end of the mechanical arm.
[0030] The worktable 1 includes an equipment area and an operation area, the robotic arm is installed in the equipment area, and the robotic arm extends the blood drawing needle 17 to the upper part of the operation area through the driving end.
[0031] The mechanical arm includes a first transmission arm 4 , a second transmission arm 9 and a pin insertion mechanism 14 . A rotational connection is formed between them through a second joint, and a rotational connection is formed between the pin ins...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More