

Self-adaptive dead zone inverse model generating device of visual servo mechanical arm system
A technology of visual servo and generating device, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc. It can solve the problems of control performance degradation, instability, gear use time and frequency loss, etc., and achieves reduction of complicated workload and excellent performance. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
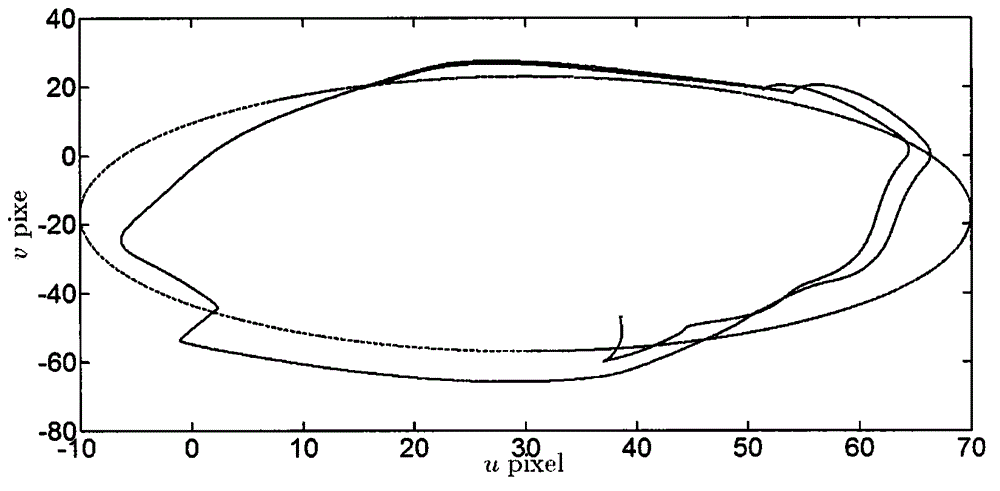
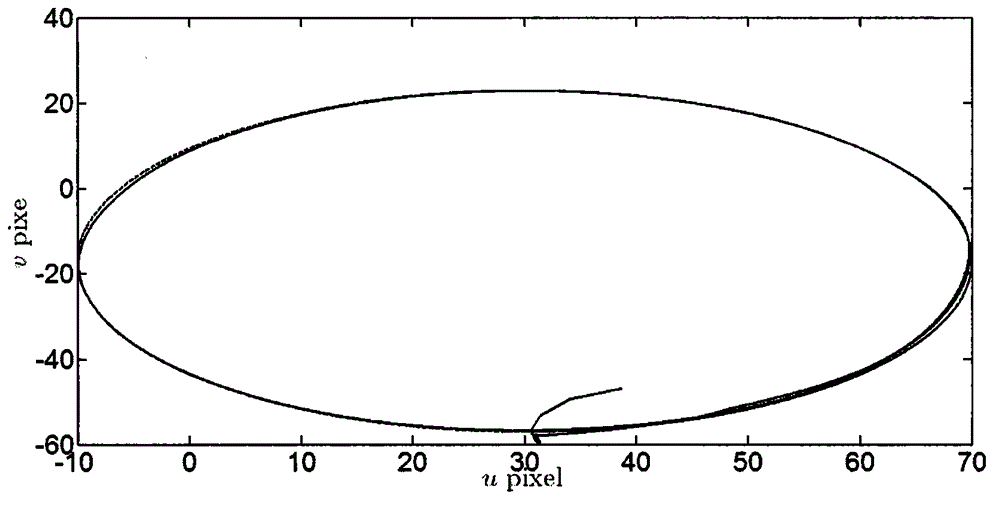
[0030] The invention relates to a dead zone inverse model generating device of a visual servo manipulator control system, which uses the designed adaptive law to estimate the parameters of the dead zone nonlinear constraint model online, and then constructs the corresponding dead zone inverse model, which can effectively The visual servo controller controls the manipulator to make the end feature points gradually track the desired image trajectory on the image plane under the condition that the input signal is eliminated, so as to achieve high image tracking accuracy. The dead zone inverse model generation device of the visual servo manipulator control system designed by the present invention will be described in detail below in conjunction with the accompanying drawings and specific examples.
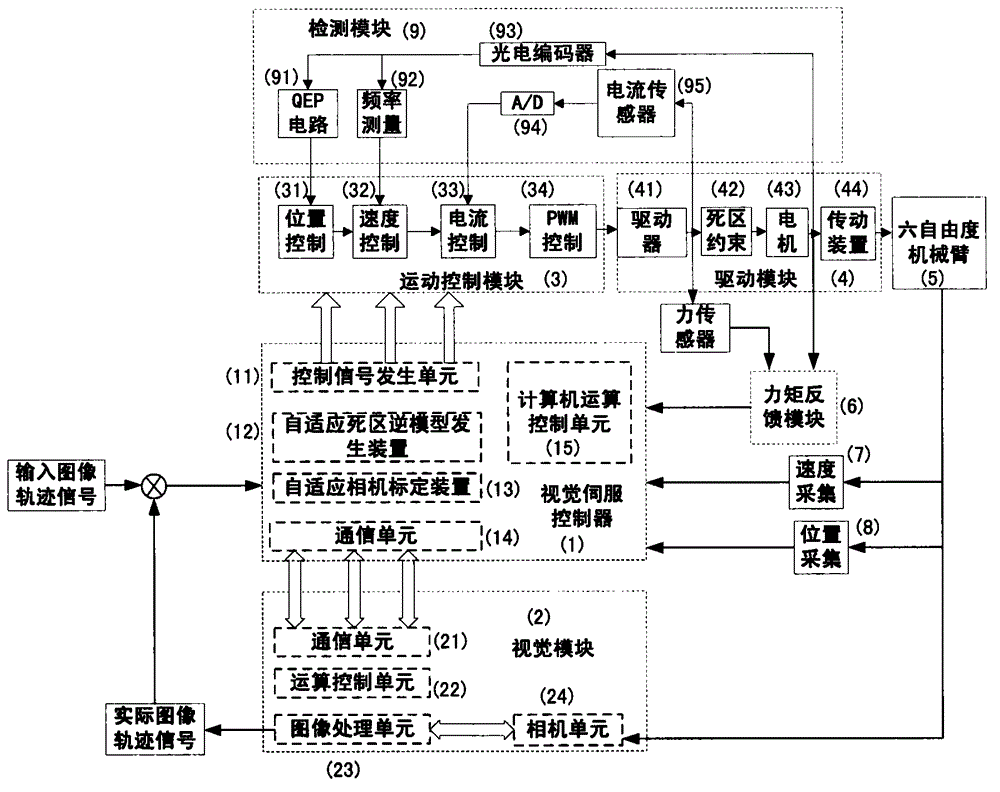
[0031] figure 1 It is the overall block diagram of the visual servo manipulator system with dead zone nonlinear constraints. exist figure 1 The purpose of designing the visual servo ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More