

Robust interference-plus-noise covariance matrix reconstruction method
A technology of interference covariance and covariance matrix, which is applied in the field of robustness of Capon adaptive beamforming, can solve problems such as reduced algorithm performance, complex integral calculation, and reduced calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
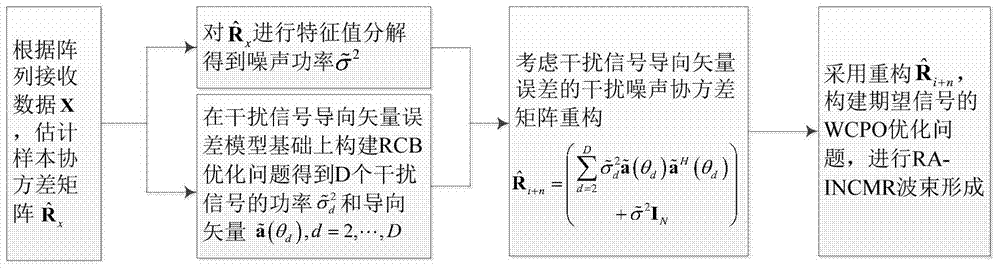
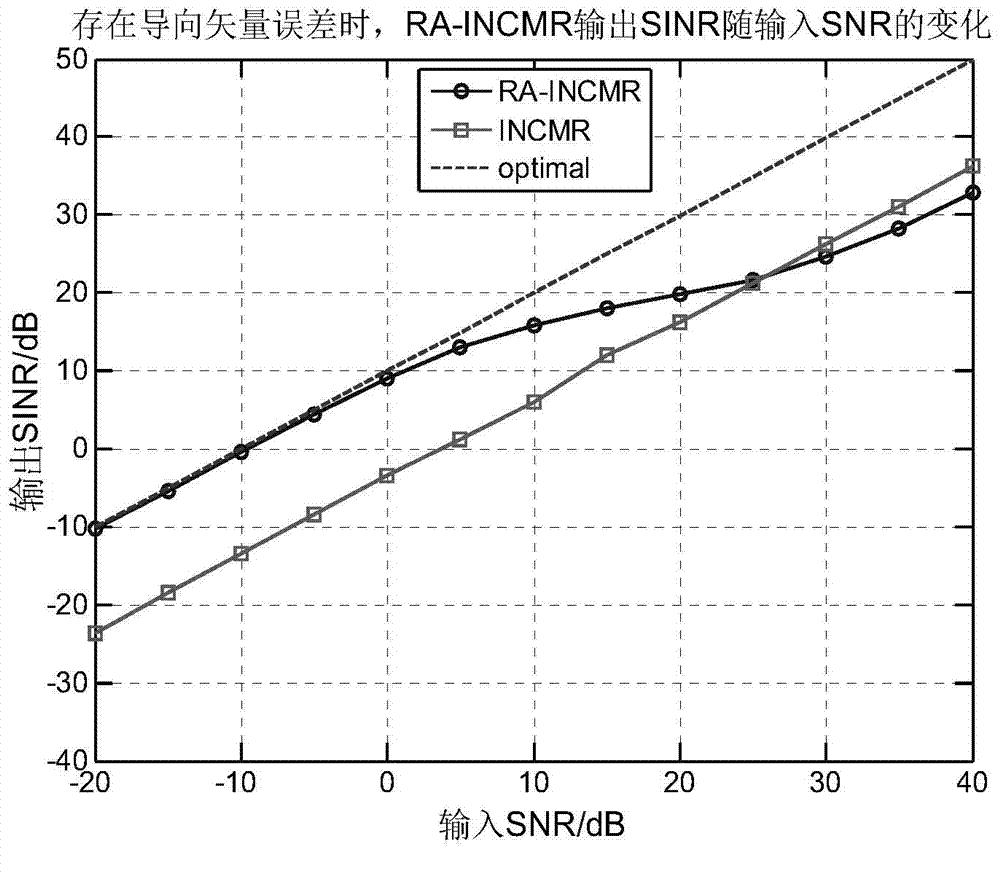
[0062] The present invention aims at the interference noise covariance matrix robust reconstruction algorithm output signal interference noise ratio SINR change simulation with expected signal input signal noise ratio SNR for interference signal steering vector error:
[0063] Example 1, a uniform linear array composed of 10 array elements receives narrow-band signals emitted by 3 far-field sources, and the preset direction of arrival of the desired signal is θ 1 =-10 0 , and its steering vector estimation error is is a zero-mean, variance ξ 1 I M The complex symmetric Gaussian random variable of , the corresponding upper limit of the error norm constraint is ε 1 , that is, the steering vector estimation error needs to satisfy The preset directions of arrival of the two interference signals are θ 2 =20 0 ,θ 3 =-30 0 , then its steering vector estimation error is is a zero mean, variance ξ d I M The complex symmetric Gaussian random variable of , the corresponding...
Embodiment 2
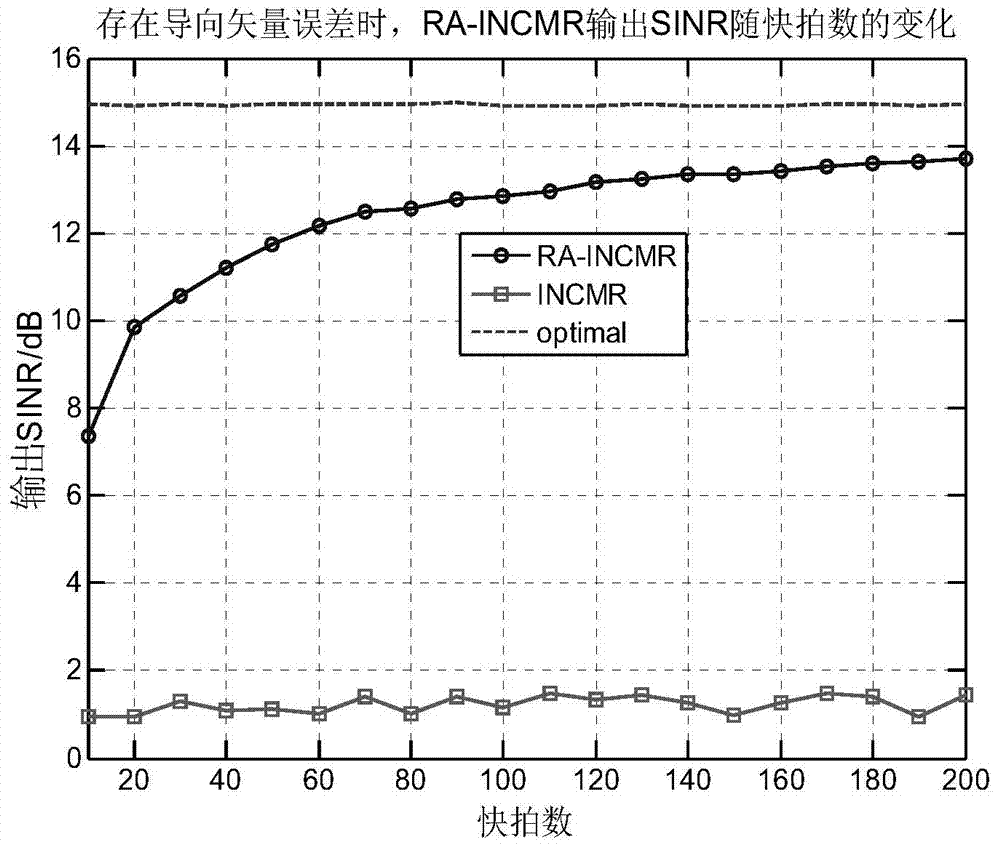
[0071] The invention aims at the interference noise covariance matrix robust reconstruction algorithm of the interference signal steering vector error and the simulation of the change of the SINR with the number of snapshots received by the array:
[0072] Example 2, a uniform linear array composed of 10 array elements receives narrow-band signals emitted by 3 far-field sources, and the preset direction of arrival of the desired signal is θ 1 =-10 0 , and its steering vector estimation error is is a zero-mean, variance ξ 1 I M The complex symmetric Gaussian random variable of , the corresponding upper limit of the error norm constraint is ε 1 , that is, the steering vector estimation error needs to satisfy The preset directions of arrival of the two interference signals are θ 2 =20 0 ,θ 3 =-30 0 , then its steering vector estimation error is is a zero-mean, variance ξ d I M The complex symmetric Gaussian random variable of , the corresponding upper limit of the e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More